
Belle réalisation Manu
Oui c'est ça qui fait l'intérêt de la discipline qu'est le modélisme , essayer de faire différent de ce qui existe déja .
J'aime bien ton système de commande surtout pour la liaison PC commande >< PC navigaunt .
Appel aux idées ...
Re: Appel aux idées ...
Moins je réfléchis plus fort et plus j'agis moins vite
Les bons crus font les bonnes cuites => Pierre Dac .
.... la simplicité est-ce bien la plus simple solution ..........?
La femme est l'avenir de l'homme .
Les bons crus font les bonnes cuites => Pierre Dac .
.... la simplicité est-ce bien la plus simple solution ..........?
La femme est l'avenir de l'homme .

Re: Appel aux idées ...
En effet cet échange fait parti de la richesse de notre loisir et de ce forum 
Manu >> n'hésites pas à nous abreuver d'explications
Manu >> n'hésites pas à nous abreuver d'explications
A+
Pat, membre de la guilde des racleurs de fond


Pat, membre de la guilde des racleurs de fond
-
Cassiope34

- Messages : 352
- Inscription : 15 avr. 2010 14:42
- Localisation : Montpellier
Re: Appel aux idées ...
C'est là que me vient l'énorme regret d'avoir pris le dessin industriel plutôt que l'électronique au lycée...!
Fantastique travail Manu ! il ne te reste plus qu'à trouver la fréquence qui va bien (la plus basse possible d'après ce que j'ai pu lire à droite à gauche, voire en AM) , puis de faire des modules compacts capables de transmettre aussi de la vidéo tant qu'à faire, pis de les proposer à pas cher et UP : AUTO-PILOT pour soum...!
En plus ça pourrait plaire à ceux qui prèfèrent construire que piloter, et il y en a plus que je croyais...!
...
Fantastique travail Manu ! il ne te reste plus qu'à trouver la fréquence qui va bien (la plus basse possible d'après ce que j'ai pu lire à droite à gauche, voire en AM) , puis de faire des modules compacts capables de transmettre aussi de la vidéo tant qu'à faire, pis de les proposer à pas cher et UP : AUTO-PILOT pour soum...!
En plus ça pourrait plaire à ceux qui prèfèrent construire que piloter, et il y en a plus que je croyais...!
...
Devise Shadocks :
"Mieux vaut mobiliser son intelligence pour des conneries, que mobiliser sa connerie pour des choses intelligentes"
"Mieux vaut mobiliser son intelligence pour des conneries, que mobiliser sa connerie pour des choses intelligentes"
Re: Appel aux idées ...
Ouai ouai ... on en est pas encore là.
Il faut déja que j'arrive a le faire plonger corrrectement.
J'ai encore un peu de mal a Lui faire trouver le point d'équilibre.
Il faut déja que j'arrive a le faire plonger corrrectement.
J'ai encore un peu de mal a Lui faire trouver le point d'équilibre.
Re: Appel aux idées ...
Salut Manu,
On est tous passé par de la mise au point, pas de soucis, bon courage pour la suite , on attend les nouvelles avec impatience
On est tous passé par de la mise au point, pas de soucis, bon courage pour la suite , on attend les nouvelles avec impatience
A+
Pat, membre de la guilde des racleurs de fond
Pat, membre de la guilde des racleurs de fond
Re: Appel aux idées ...
Bon j'ai réglé un souci mais ne suis pas encore au bout de mes peines...
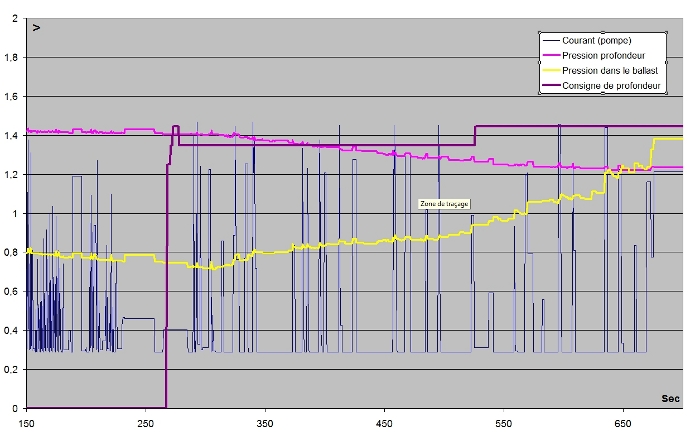
Vous voyez sur le graph ci-dessus un enregistrement des pressions vu par mes 2 capteurs (profondeur et pression dans le ballast). On voit que la profondeur a tendance à diminuer alors que le ballast se rempli! Comme le soum coule bien j'en dédui qui il y a un pb sur la mesure de la profondeur. Après 2 jours à me gratter la tête j'ai enfin compris:
Le capteur de pression fonctionne en différentiel et sa référence est la pression interne du sous-marin. C'est à dire que la pression vu par mon système est la différence entre l'extérieur(pression de l'eau sur la coque) et la pression interne du sous-marin (supposé constante).
Or lors du remplissage du ballast celui-ci se déforme: il "gonfle" faisant augmenter la pression dans le sous-marin plus vite que la profondeur d'où une différence de pression qui diminue vu du capteur.
La solution fut d'isoler la référence de pression du capteur avec un bout de durite bouchée comme ci-dessous. L'idéal serait bien sur d'avoir un ballast parfaitement rigide.


Le signal de profondeur est maintenant effectivement beaucoup plus cohérent. Mais malgré tout ça le sous-marin continue à osciller entre le fond et la surface sans jamais se stabiliser autour de la consigne de profondeur.
En jouant sur quelques paramètres dans le soft de cmd de la pompe j'ai pu ralentir ses mouvements. Il descend et remonte beaucoup plus lentement que lors des premières plongées mais il ne se stabilise toujours pas. J'ai l'impression que le pois de la bête n'y est pas pour rien. Vu l'inertie je pense que le système pompe+ballast n'est pas suffisamment réactif pour stabiliser l'engin dès lors qu'il est en mouvement vertical.
Malheureusement pour moi, fini les vacances. Je suis remonté en région parisienne, donc c'est un peu plus compliqué de jouer au sous-marinier sans piscine mais je ne lâche pas l'affaire.
Vous voyez sur le graph ci-dessus un enregistrement des pressions vu par mes 2 capteurs (profondeur et pression dans le ballast). On voit que la profondeur a tendance à diminuer alors que le ballast se rempli! Comme le soum coule bien j'en dédui qui il y a un pb sur la mesure de la profondeur. Après 2 jours à me gratter la tête j'ai enfin compris:
Le capteur de pression fonctionne en différentiel et sa référence est la pression interne du sous-marin. C'est à dire que la pression vu par mon système est la différence entre l'extérieur(pression de l'eau sur la coque) et la pression interne du sous-marin (supposé constante).
Or lors du remplissage du ballast celui-ci se déforme: il "gonfle" faisant augmenter la pression dans le sous-marin plus vite que la profondeur d'où une différence de pression qui diminue vu du capteur.
La solution fut d'isoler la référence de pression du capteur avec un bout de durite bouchée comme ci-dessous. L'idéal serait bien sur d'avoir un ballast parfaitement rigide.
Le signal de profondeur est maintenant effectivement beaucoup plus cohérent. Mais malgré tout ça le sous-marin continue à osciller entre le fond et la surface sans jamais se stabiliser autour de la consigne de profondeur.
En jouant sur quelques paramètres dans le soft de cmd de la pompe j'ai pu ralentir ses mouvements. Il descend et remonte beaucoup plus lentement que lors des premières plongées mais il ne se stabilise toujours pas. J'ai l'impression que le pois de la bête n'y est pas pour rien. Vu l'inertie je pense que le système pompe+ballast n'est pas suffisamment réactif pour stabiliser l'engin dès lors qu'il est en mouvement vertical.
Malheureusement pour moi, fini les vacances. Je suis remonté en région parisienne, donc c'est un peu plus compliqué de jouer au sous-marinier sans piscine mais je ne lâche pas l'affaire.

Re: Appel aux idées ...
Salut , c'est exactement le problème que j ai posé il y a quelques temps en discutant avec ADX et concernant mon système (mpx2100)p même si ce n est pas le même capteur que toi , il faut isoler la reference ou le mettre dans un mini caisson étanche ; ton tube bouché est bien mais pas assez il faut du RIGIDE car même avec cette -- petite differnece de pression le bout de tuyau se déforme un peu ou alors isoler totalement le capteur et ne sortir que la prise , sont tellement précise ces petites bêtes que ..................
@+ jojo
@+ jojo

Re: Appel aux idées ...
Salut à tous,
Je confirme qu'un capteur de pression "absolue" est avant tout un capteur de pression "relative", la référence étant la pression du milieu dans lequel il se trouve. En l'occurence, boucher l'entrée de référence du capteur revient à la rendre indépendante des perturbations qu'elle pourrait subir (déformation de coque due à la profondeur-> faut construire rigide ! l'abaissement de la température de l'eau lorsque le soum est immergé créé une dépression puisque l'air emprisonné se refroidit -> installer le chauffage ! variation de la pression interne-> cela dépend du système de ballast employé, les pistons et autres poches médicales contribuent à l'augmentation de pression interne lorsqu'elles se trouvent dans la zone étanche... )
variation de la pression interne-> cela dépend du système de ballast employé, les pistons et autres poches médicales contribuent à l'augmentation de pression interne lorsqu'elles se trouvent dans la zone étanche... )
En ce qui concerne l'oscillation du soum autour de la consigne de profondeur il faut intégrer un régulateur PID (Proportionnel, Intégral, Dérivé) dans la boucle de régulation, mais là le plus dur reste à définir les paramètres à utiliser. Selon la taille du soum la durée de calcul de la boucle doit être relativement lente (de l'ordre de la seconde voire plus ! )
Bon courage !
Je confirme qu'un capteur de pression "absolue" est avant tout un capteur de pression "relative", la référence étant la pression du milieu dans lequel il se trouve. En l'occurence, boucher l'entrée de référence du capteur revient à la rendre indépendante des perturbations qu'elle pourrait subir (déformation de coque due à la profondeur-> faut construire rigide ! l'abaissement de la température de l'eau lorsque le soum est immergé créé une dépression puisque l'air emprisonné se refroidit -> installer le chauffage !
En ce qui concerne l'oscillation du soum autour de la consigne de profondeur il faut intégrer un régulateur PID (Proportionnel, Intégral, Dérivé) dans la boucle de régulation, mais là le plus dur reste à définir les paramètres à utiliser. Selon la taille du soum la durée de calcul de la boucle doit être relativement lente (de l'ordre de la seconde voire plus ! )
Bon courage !
-
Geeks

- Messages : 3593
- Inscription : 03 juil. 2010 21:04
- Localisation : Brive la Gaillarde (Correze 19)
Re: Appel aux idées ...
Je vais peut-être dire une ânerie mais si je pense que sur un tel modèle un ballast central est effectivement une bonne solution, pourquoi ne pas ajouter deux propulseurs verticaux qui stabiliserais la plongée ? De cette façon tu alourdi pour plongé avec le ballast puis tu stabilise avec les propulseurs. Autre solution (peut être encore plus idiote) serais de placer un mini ballast supplémentaire qui ne varierais qu'un tout petit peu de façon à resté sur la consigne...
Personnellement, je testerais la solution 1 avec mon jaune (quand je m'y remettrait) et ce n'est pas pour de suite vue que je compte navigué pour le 26 septembre et que j'attends un coup de main pour apprendre à usiné mes presses étoupes mais je suis prêt à en débattre en exposition.
Personnellement, je testerais la solution 1 avec mon jaune (quand je m'y remettrait) et ce n'est pas pour de suite vue que je compte navigué pour le 26 septembre et que j'attends un coup de main pour apprendre à usiné mes presses étoupes mais je suis prêt à en débattre en exposition.
A défaut d'avoir la science infuse, j'infuse la science. - Racleur de fond depuis Pons 2014.
Sous-marin en état de repos sur cale : Minimog 01
Sous-marin en état de repos sur cale : Minimog 01
Re: Appel aux idées ...
Merci pour vos retours.
Je vais déjà étudier une PID digne de ce nom car ce que j'ai fais pour le moment dans mon soft était un peu au feeling (pas très bon apparemment).
Il faut que je me documente un peu sur le sujet c'est un peu loin tout ça.
J'ai aussi des collègues au boulot qui sont spécialistes en automatique. Je vais faire bosser les pros de matlab ça devrait les amuser 2 minutes.
A+
Manu
Je vais déjà étudier une PID digne de ce nom car ce que j'ai fais pour le moment dans mon soft était un peu au feeling (pas très bon apparemment).
Il faut que je me documente un peu sur le sujet c'est un peu loin tout ça.
J'ai aussi des collègues au boulot qui sont spécialistes en automatique. Je vais faire bosser les pros de matlab ça devrait les amuser 2 minutes.
A+
Manu