Ayant rejoint ce forum il y a quelques mois, je n'ai jamais pris le temps de présenter mon projet actuel : la réalisation d'un AUV semi-autonome pour l'exploration sous marine à 10m de profondeur.
Je travaille dessus depuis plusieurs mois et j'ai déjà réalisé un prototype fonctionnel, sur lequel je rajoute des fonctionnalités avant de migrer vers une plateforme plus robuste.
Le prototype consiste en :
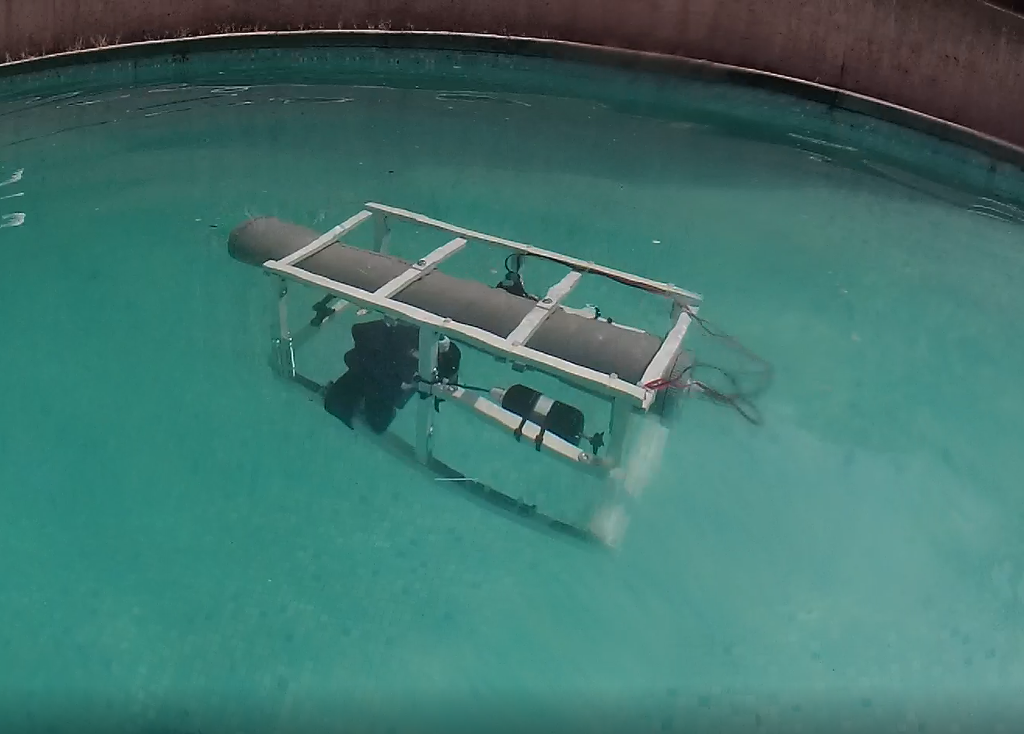
- Partie étanche: un tube de PVC, diam 100mm et 500mm de long, avec des bouchons à visser aux 2 extrémités. Les sorties de cables se font avec un presse étoupe IP68, sur l'axe longitudina.
- Structure : cadre en PVC, pour supporter le WTC et les moteurs. Comme vous pouvez le voir sur les photos, il supporte aussi le lestage pour les tests.
- Moteurs : 2 propulseurs horizontaux et 2 verticaux, chacun dans un boitier étanche (moteur DC inséré dans un tube PVC de diam. 40mm, noyé dans la graisse et fermé aux 2 extrémité par un bouchon PVC collé).
- Electronique embarquée : une carte Arduino Méga, 2 contrôleurs LN298, radio CC1101 @433MHz, pompe péristaltique, ballast et contrôle pompe avec L293D
- Plongée : dynamique par propulseurs verticaux et statique par ballast interne
- Contrôle : manette de PS2 modifiée avec une Arduino Uno et une radio CC1101 @433MHz
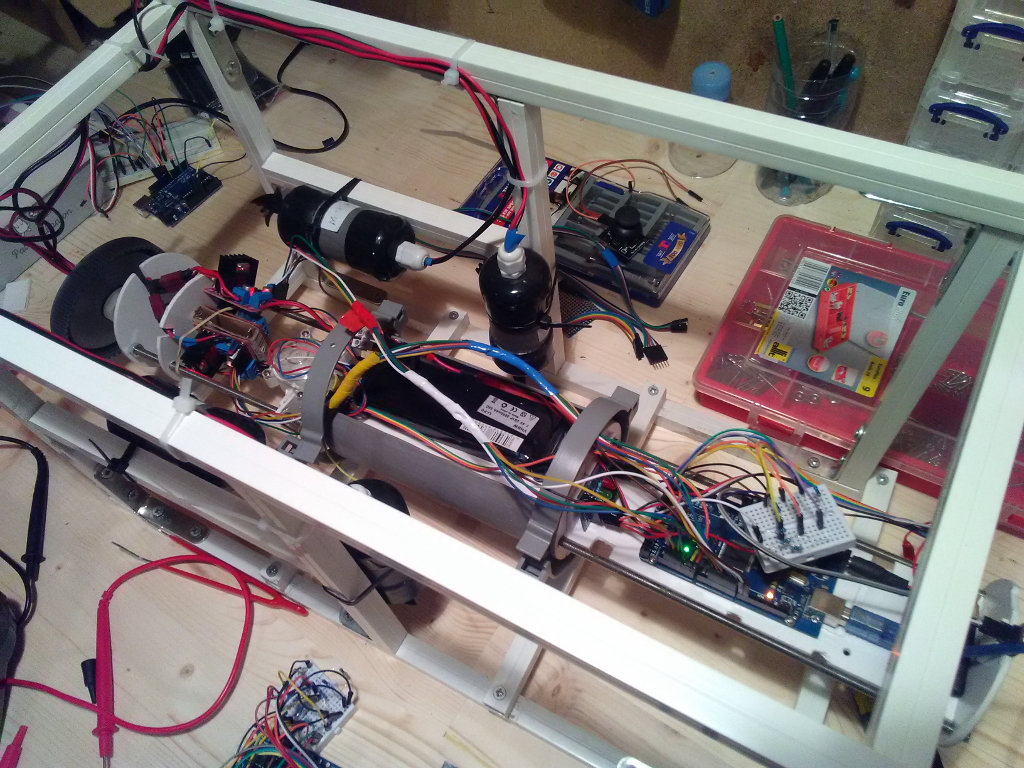
Les images sont un peu vieilles et j'ai apporté quelques modifications depuis, mais on comprend bien le principe : il y a plein de fils dans le tube étanche.
Le tout est fonctionnel et a été testé en piscine courant Avril, avec plusieurs plongée à 1.5m de fond. Evidemment, le signal radio @433MHz n'est pas optimal passé 1m de profondeur, mais c'est surtout pour tester la faisabilité.

Depuis ces tests, je travaille à rajouter :
- un module GPS pour avoir une position précise en surface
- une centrale inertielle MPU 92/65 gyro-compas magnétomètre, pour dériver la position et l'orientation
- un sondeur pour déterminer la profondeur sous la quille
- un capteur de pression pour déterminer la profondeur sous la surface...
- une télécommande intégrant la carte Arduino et la radio

Ces éléments me permettront de rendre le sous marin autonome, afin de pouvoir lui donner une série de points de passage (waypoints) en coordonnées (x,y) et profondeur (z).
Je travaille aussi au développement d'un sonar, afin d'être en mesure de détecter les obstacles et de déterminer une trajectoire de contournement (en 3 dimensions..) Mais cela nécessitera d'utiliser un vrai micro-ordinateur, comme un Raspberry Pi3, car l'Arduino est bien incapable de traiter ce type de calcul.
C'est un projet ambitieux et je sais que je ne suis ni le premier, ni le dernier à me lancer là dedans. N'hésitez pas à me faire part de vos commentaires et de vos questions, j'y répondrais avec plaisir ! J'aurais pour ma part plusieurs questions afin de profiter des quelques centaines d'années d'expérience cumulées sur ce forum
A très bientôt
Gaël