Salut tout le monde ! 
Tout d’abord, merci pour les commentaires et l’intérêt que vous portez à ce sujet.
Pierre, en effet, cela change la maison ! C’était un projet vieux de 20 ans et préparé depuis 11 ans !

Il ne manquait plus que le temps pour m’y consacrer…
Quand au plastique, comme tu le dis toi-même,
« C’est fantastique !!! » 
Et je suis ton sujet sur le contrôleur de décharge des Lipo…
Allez hop… La suite !!!  Et tout de suite une photo imageant bien mon propos en fin de post précédent : la prise de charge de la batterie principale est juste accessible sur la carte définitive, lorsque l’arrière du sous-marin est assemblée !
Et tout de suite une photo imageant bien mon propos en fin de post précédent : la prise de charge de la batterie principale est juste accessible sur la carte définitive, lorsque l’arrière du sous-marin est assemblée ! 
Vous remarquerez l'étiquette avec le poids marqué de cette partie du sous-marin ; en prévision du 1er bain et des répartitions de charges à effectuer...

Bon, je sais que la technique n’est pas la tasse de thé de bon nombre de modélistes, (j’en connais quelques-uns
« qui entrave que dalle » pour reprendre leur expression…

) mais c’est le passage obligé pour avoir
un modèle qui fonctionne comme on le désire, de façon fiable et durable. 
Je m’efforce donc d’être aussi clair et précis que cela est possible et si cela en inspire certain, qu'il n’hésitent pas, je reste ouvert aux questions !
Donc, avant d’aller plus loin, on va faire un peut de théorie technique, avec le schéma de principe des alimentations.

Une fois n’est pas coutume, on commence par regarder à droite du schéma car c’est là que se trouve le cerveau du système : une carte
ARDUINO Mini. Elle se chargera de la surveillance des alimentations, de la gestion des sécurités, et de la correction d’assiette du sous-marin.
Comme on va le voir maintenant, c’est elle qui va activer ou désactiver les relais « R2 » et « R3 » en fonction des niveaux de tension, mesurés sur les lignes marquées « CTRL 12V » et « CTRL 6V ».
La mise en route normale se fait par l’activation à l’aide d’un aimant de « l’ILS Marche », disposé du côté droit du sous-marin, qui alimente la bobine « R0A » du relais bistable « R0 ».
Le contact de ce relais « R0 » se ferme et alimente la bobine du relais « R1 » ainsi que la ligne « CTRL 12V » si l’interrupteur de mise en marche est en position « ON », ce qui est normalement le cas. Son utilité ??
C’est simplement de faciliter la manœuvre lors d’interventions sur table après une mise en route initiale par un aimant ; les marches / arrêts successifs sont effectués avec l’interrupteur, ce qui est plus facile que de balader un aimant lorsque l’arrière est démonté…
Le contact du relais « R1 » se ferme et alimente en 12 Volts le variateur depuis la batterie de secours, puisque le contact du relais « R2 » est en position repos.
Dés lors, le variateur fournit le 5 Volts nécessaire au fonctionnement de la radio et de la carte ARDUINO.
Sitôt son initialisation terminée, la carte ARDUINO commence son travail de surveillance :
La ligne « CTRL 12 V » lui permet de contrôler la tension de la batterie de secours et deux cas se présentent :
- soit la batterie n’est pas chargée correctement : la mise en route ne va pas plus loin pour le 12 Volt et c’est le passage immédiat en position de sécurité et, donc, retour à l’atelier !
- soit la batterie est correctement chargée : l’ARDUINO active alors la ligne « CDE 12V » qui va entraîner le collage du relais « R2 ».
On passe alors sur la batterie principale 12 Volts par le basculement du contact inverseur de « R2 » et le contrôle de la tension se poursuit en permanence, ce qui amène là aussi à 2 possibilités :
- soit la batterie est correctement chargée : la mise en service continue et, si tout va bien, on navigue un certain temps, au maximum jusqu’à la décharge de la batterie, ce qui nous amène à la deuxième possibilité.
- Soit la batterie n’est pas correctement chargée (ou en fin de décharge après un certain temps d’utilisation) : le relais « R2 » repasse en position repos, ce qui remet en service la batterie de secours, et l’ARDUINO gère le passage en sécurité du sous-marin.
Si tout se passe bien pour l’alimentation 12 Volts lors du démarrage, l’ARDUINO gère alors l’alimentation 6 Volts en activant la ligne « CDE 6V », qui entraîne le collage du relais « R3 ».
Le contact inverseur du relais « R3 » commute la batterie 6 Volts en lieu et place de l’alimentation 5 Volts du variateur et la tension est contrôlée par la ligne « CTRL 6V » de l’ARDUINO et, là aussi, on a deux cas de figure :
- soit la batterie 6 Volts est correctement chargée : la mise en route est terminée et on peut naviguer jusqu’à la décharge complète de la batterie, ce qui amène au deuxième cas.
- soit la batterie n’est pas correctement chargée (ou en fin de décharge après un certain temps d’utilisation) : l’ARDUINO provoque le basculement du relais « R3 », donc le retours sur l’alimentation 5 Volts du variateur, et gère la mise en sécurité du sous-marin.
Enfin, la mise hors service du sous-marin s’effectue par le passage d’un aimant devant « l’ILS Arrêt » placé du côté gauche de la coque : cela provoque l’alimentation de la bobine « R0B » du relais bistable qui entraîne la retombée du contact « R0 ».
Les 3 relais « R1, R2 et R3 » ne sont plus alimentés et retombent en coupant l’alimentation de tout le système.
Ce fonctionnement est semblable à celui déjà installé sur l’U-47 et sur le LAUBIE, à deux détails prêts :
- sur les deux autres sous-marins, il n’y a pas de relais « R1 » qui coupe la totalité de l’alimentation 12 Volts, car inutile, contrairement au RUBIS dont le double variateur de propulsion fournit le 5 Volts par un dispositif « BEC » ; cette fourniture du 5 Volts consomme en permanence quelque « pouillémes » qui vont, à la longue, décharger la batterie 12 Volts de secours, avec tous les problèmes que cela induit…
- sur les précédents montages, la gestion des sécurités et la surveillance des tensions sont assurées par des circuits classiques, avantageusement remplacés ici par la carte ARDUINO, surtout en terme de place occupée !
Comme écrit précédemment, la circuiterie est partagée sur 3 cartes distinctes, la plus grande étant celle qui gère la mise en route et les commutations du 12 Volts, dont voici le synoptique :

On constate la présence de plusieurs éléments non cités précédemment, mais qui sont raccordés sur cette carte pour simplifier et regrouper les fonctions sur un minimum de câbles de liaison.
Il y a, par exemple, la pompe du ballast qui est représentée en bas à gauche ; elle est raccordée sur la carte par un connecteur 3 broches qui amène l’alimentation 12 Volts et récupère en même temps l’information « Ballast Plein » qui est ensuite exploitée par la carte AUDUINO.
A droite, on a le détail du connecteur du câble de liaison avec l’avant du sous-marin : on remarque le regroupement de l’ensemble des commandes en provenance de la radio et de la carte ARDUINO.
Voici donc la carte définitive en lieu et place de la carte provisoire. C’est chargé !!!

On voit bien les 3 relais « R0, R1 et R2 » ainsi qu’un petit connecteur blanc à gauche de « R0 » : c’est ici que sont branchés les ILS de mise en marche et d’arrêt, lorsque l’arrière du sous-marin est assemblé, comme sur la première photo de ce post.
On comprend l’intérêt de l’interrupteur situé à gauche, pour les tests en atelier !!!
Le variateur est complètement caché sous le servo de ballast et, sur la gauche, le graisseur est à peine visible derrière les câbles !
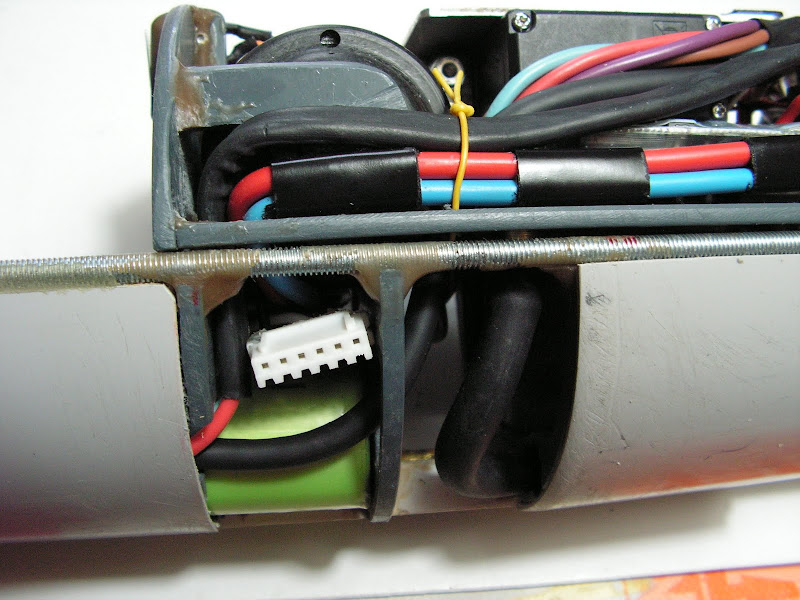
Cette fois, la prise de charge est tout au bord de la carte, ce qui la rend accessible, arrière monté….
 …La preuve !!!
…La preuve !!! 
 Un peu plus vers l’avant, on trouve la prise d’équilibrage de la batterie 12 Volts principale et on constate le peu de place disponible pour passer les câbles…
Un peu plus vers l’avant, on trouve la prise d’équilibrage de la batterie 12 Volts principale et on constate le peu de place disponible pour passer les câbles…
 Du côté droit de la carte, on distingue à gauche le connecteur du câble de liaison vers l’avant ; au centre, le connecteur vert de transfert des alimentations vers la carte de gestion 6 volts et l’utilisation à l’avant et, à droite, les connecteurs des servos des barres et d’orientation de la tourelle TLT.
Du côté droit de la carte, on distingue à gauche le connecteur du câble de liaison vers l’avant ; au centre, le connecteur vert de transfert des alimentations vers la carte de gestion 6 volts et l’utilisation à l’avant et, à droite, les connecteurs des servos des barres et d’orientation de la tourelle TLT.
Les connecteurs du variateur et du servo de ballast sont partiellement cachés par le câble de liaison, ainsi que le connecteur du feu de position arrière.
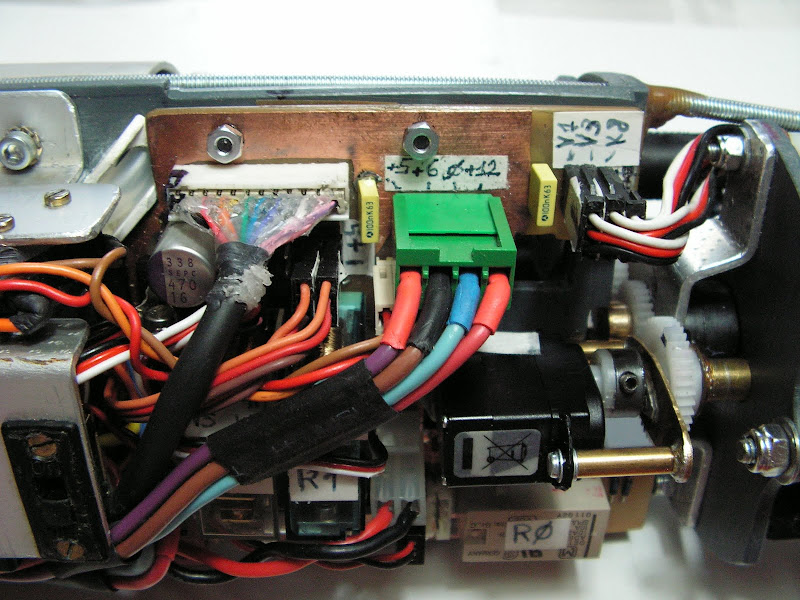 Sous cet angle, on distingue mieux la disposition des connecteurs et des câbles ; ça rentre au chausse pied !!
Sous cet angle, on distingue mieux la disposition des connecteurs et des câbles ; ça rentre au chausse pied !!
La durite d’amenée d’eau au ballast trouve tout juste sa place entre le moteur et la cloison à droite !
 Voici l’élément de tube arrière qui coiffe toute cette partie du rack technique ; il porte sur ses oreilles de fixation les 2 ILS de mise en marche et d’arrêt, placé très près de la coque, ce qui facilite l’activation par l’aimant.
Voici l’élément de tube arrière qui coiffe toute cette partie du rack technique ; il porte sur ses oreilles de fixation les 2 ILS de mise en marche et d’arrêt, placé très près de la coque, ce qui facilite l’activation par l’aimant.
On note au premier plan la présence des connecteurs de liaison des ILS (à droite, 3 broches) et du feu de position arrière. (à gauche, 2 broches)
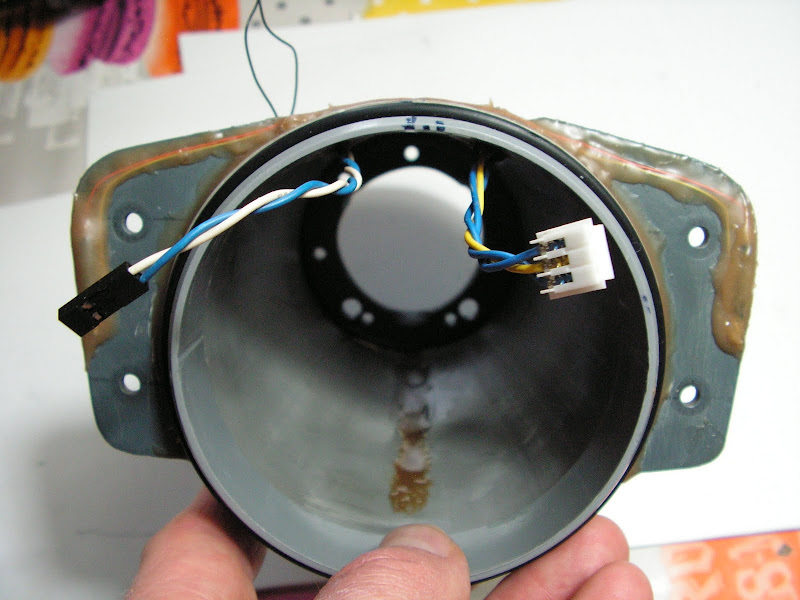 Le câblage des ILS est entièrement noyé dans la colle pour assurer une parfaite protection et isolation.
Le câblage des ILS est entièrement noyé dans la colle pour assurer une parfaite protection et isolation.
Et le feu de position (provisoire sur la photo) est raccordé par deux broches qui seront protégées par de la gaine thermo et isolé de l’eau par de la « Pâte à Fixe ».

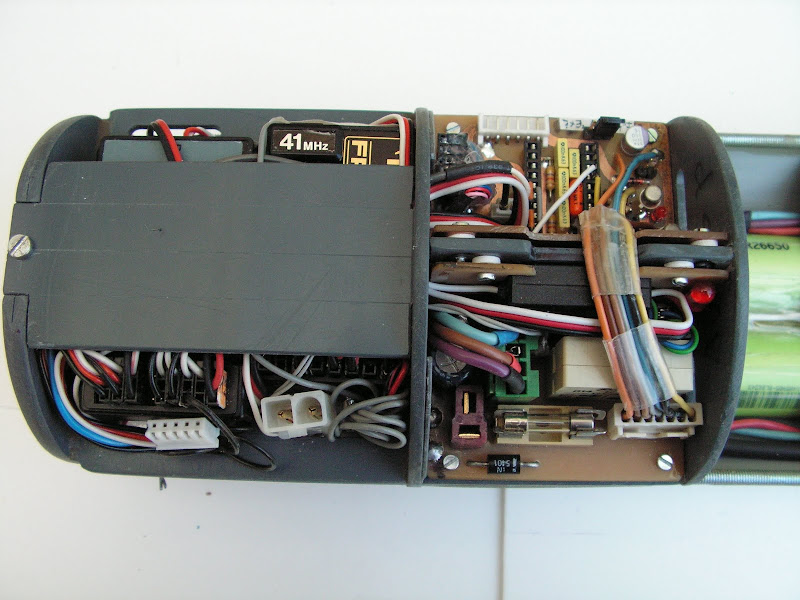
Maintenant, passons à l’avant du rack technique ; là aussi, c’est chargé !!!
J’ai du ruser pour placer la batterie de secours, du fait du manque de place lié au changement de format des accus !
On distingue à peine les 2 éléments LiFe en 1,1 Ah de couleur jaune disposés du côté gauche !
On notera la présence des prises d’équilibrage à gauche et de charge, de type « TAMIYA », à droite pour la batterie de secours, et, partiellement cachée par la tige filetée, la prise d'équilibrage de la batterie 6 Volts..
 Les 2 éléments disposés du côté droit ont un peu plus d’aisance ; j’ai du modifier la cloison verticale (invisible sur cette photo) afin de permettre le démontage de cette batterie.
Les 2 éléments disposés du côté droit ont un peu plus d’aisance ; j’ai du modifier la cloison verticale (invisible sur cette photo) afin de permettre le démontage de cette batterie.
 L’avant du rack, vue de dessus .
L’avant du rack, vue de dessus .
A gauche, on retrouve les deux prises citées précédemment, ainsi que la plaque de maintien du récepteur. Elle portera, plus tard, les connections d’antenne et de liaison des feux de position.
Dans le compartiment de droite, on a, en haut, la carte support de l’ARDUINO et, en bas, la carte de gestion de l’alimentation 6 Volts.
Si on retire la plaque de maintien du récepteur, on remarque le nombre conséquent de câbles ainsi que la présence du module « MULTI SWITCH ».
 La carte de gestion du 6 Volts se compose en réalité de 2 cartes disposées perpendiculairement.
La carte de gestion du 6 Volts se compose en réalité de 2 cartes disposées perpendiculairement.

La carte de base supporte la prise de charge de la batterie 6 Volts. Au premier plan, on a le fusible et à droite, le connecteur de liaison des commandes avec la carte ARDUINO et, juste derrière le connecteur, le relais « R3 ».
A gauche, le connecteur de couleur verte assure la liaison des tensions 5 et 6 Volts avec la carte disposée à l’arrière.
En arrière plan, on distingue à peine la carte verticale ; elle supporte le module « MEMOSAFE » de détection de perte radio, ainsi qu’une partie de la circuiterie de détection de voies d’eau.
Voici le schéma du circuit, pour ceux que cela intéresse. La carte principale est en haut, la carte verticale, en dessous. En bas, le schéma de principe de la détection d’eau.

Dans le principe, cet ensemble reprend intégralement le système déjà développé pour le U-47 et le LAUBIE et qui est présenté dans le dossier dédié aux sécurités de sous-marins, consultable ici :
viewtopic.php?f=52&t=2405#p44088
Enfin, on trouve sur le côté droit du rack, la carte support de l’ARDUINO mini.

Elle n’est pas encore en place car pas programmée. De même, la carte verticale visible en arrière plan recevra la circuiterie du correcteur d’assiette, non indispensable pour le moment.
Voici le synoptique de cette carte, avec le détail des entrées et sorties d’infos que l’ARDUINO va avoir à gérer.

Les infos « CTRL 6V » et « CTRL 12V » subissent une mise à niveau avant d'attaquer les entrées analogique de mesure.
L’entrée de « CTRL Ballast » subit elle aussi un traitement particulier avant d'être exploitée par l'ARDUINO, afin d'éviter une surtension (le switch « Ballast plein » commute du 12 Volts et l'entrée de l'ARDUINO n'accepte que du 5 Volts au maximum) et, en même temps, supprimer les effets de rebond du contact du switch.
De même, les sorties de commande « CDE 6V » et « CDE 12V », ainsi que la sortie d'alarme, pilotent chacune un transistor qui amplifie le signal et permet d'alimenter les bobines de relais.
Enfin, on remarque la présence de 3 voies de la radio en entrée et en sorties de la carte :
Deux concernent les barres de plongée :
- * en fonctionnement « manuel », les sorties recopient les entrées, sans aucun traitement.
- * en fonctionnement « auto », les entrées sont inactivent car c’est le correcteur d’assiette qui agit sur les sorties.
- * en mode « défaut », les sorties sont forcées en position « cabré », ce qui constitue une signalisation visible de l’état de défaut.
La troisième voie contrôle le ballast principal ; là aussi, la sortie correspondante ne suit pas toujours l’état de l’entrée !
- * en l’absence de défaut (voie d’eau, batterie faible ou perte radio), la commande est transmise normalement jusqu’au remplissage complet du ballast. L’info « Ballast plein » rentre dans l’ARDUINO après mise en forme du signal et provoque le retour au neutre du servo de ballast, même si la commande est maintenue !
- * de même, chaque commande du ballast déclenche un compteur de temps qui évolue suivant le sens, « purge » ou « chasse », afin de limiter le temps de fonctionnement de la pompe en fin de chasse du ballast.
- * en présence d’un défaut, l’ARDUINO force la vidange du ballast, en tenant compte du compteur de temps précédemment décrit, puis ramène le servo du ballast en position neutre ; l’entrée de commande n’est plus active, tant que le défaut est présent. Si c’était une perte radio et que celle-ci revient, l’entrée de commande redevient active.
Là encore, on retrouve le fonctionnement déjà en place sur mes autres sous-marins.
Afin de permettre le fonctionnement minimum des alimentations, plusieurs petits fils sont disposés en lieu et place de la carte ARDUINO.

On remarque aussi le connecteur blanc, en bas, destiné au raccordement de la carte interface USB permettant la programmation de la carte ARDUINO, sans avoir à la retirer de son support. De même, le petit strap sur l’alimentation 5 Volts, visible à gauche, permet d’alimenter l’ARDUINO lors de sa programmation, sans alimenter l’ensemble du sous-marin.
Pour la technique, ce sera tout pour le moment !
La suite à venir bientôt pour la partie concernant l’avant du RUBIS, sur laquelle je travail actuellement, soit ce module qui porte la vanne 3 voies, les motoréducteurs et les servos de barre et de commande de la pompe auxiliaire.

Cordialement de Jacky-Soum








