Il y'a aussi des motoréducteurs chez patjabix , je crois en avoir vu sur son site .
Moins je réfléchis plus fort et plus j'agis moins vite
Les bons crus font les bonnes cuites => Pierre Dac . .... la simplicité est-ce bien la plus simple solution ..........?
La femme est l'avenir de l'homme .
Merci à tous.
Je pense abandonner le principe de la tige filetée entrainée par un motoréducteur. Réadapter un nouveaun moteur sur l'ancien système prend soit trop de place soit n'est pas assez puissant.
Donc, un simple servo ferai l'affaire.
Le montage mécanique est déjà en place et fonctionne assez bien. le mini servo est un peu juste pour les butées mais avec un bon réglage des tringleries, je devrai récupérer les maximum d'ouverture et fermeture. Sin non je change pour un servo plus puissant. J'ai un peu de marge.
Il reste encore l'électronique qui va le piloter à fabriquer.
Merci à Perceval pour ses propositions.
Ca me rassure que l'unisercom puisse fonctionner avec un inverseur.
Je ne connais pas le shéma de cablage pour sa connection à l'inverseur.
Pour l'instant, j'ai toujours mes cables d'alimentation de l'ancien moteur en place (+-, -+).
Ca serait bien de pouvoir les utiliser pour l'unisercom que je ne possède pas encore.
Si ce n'est possible, au lieu de l'inverseur, il serait peut-être envisageable de n'avoir qu'un seul inter : contact = ouverture, coupure = fermeture.
De plus, j'ai remarqué une chose. Le sero grogne un peu en butée pour maintenir les portes fermées.
Il risque de griller à long terme si je ne fais rien.
Je pense peut-être couper l'alimentation du servo avec une tempo. Comme ça, il ne serait alimenté que le temps nécessaire à la manoeuvre. Qu'en pensez vous ?
Si c'est réalisable, une âme châritable pourrait t'elle me concocter tout cela afin de n'avoir plus qu'à connecter le servo dessus ?
Mes sous-marins en état de marche :
Un Surcouf, un Seaview, une Flying sub, un Minisub, un subracer.
Autres modèles : quadricoptère MiniDex amphibie full carbon, Quad Alien 680 pliable slowfly + Gopro
J-Pay quad 250 racer, Hexacoptère Typhoon H Yunnec.
je vais peut être dire une connerie,mais bon pas grave
en partant de ce principe, cela devrait fonctionner,tu ne tiens pas compte des 2 interrupteurs a gauche, comme expliqué samedi ,ils m'allument des lumières,radar,ect quand mon périscope est soit haut ou soit bas
donc avec ce schéma ,quand mon moteur arrive en butée, sur le contact haut ou bas il se coupe, mais je peut le relancer dans le sens contraire donc si tu remplaces les deux micro-interrupteur par deux ILS,,c'est tout bon,si tu as une voie tout ou rien qui commande un inverseur de polarité
Papy. Oui, ton montage fonctionne. D'ailleurs c'est un peu ce que j'ai déjà.
Mon inverseur, en fait, fait partie d'un sélecteur monté sur un servo et alimentait le motoréducteur dans un sens ou dans l'autre.
Maintenant, je souhaite réutiliser ces fils pour y connecter un unisercom qui pilotera lui un servo en autonome. Donc rien ne sera connecté au récepteur. Seuleument une alim +- ou -+, l'inverseur quoi. Je crois que c'est possible, mais me faut un shéma.
Question tempo, si ça ne se coupler à l'unisercom, il me reste le choix de mettre un fin de course et une diode sur la tête du servo qui coupera son moteur (non alimenté, il maintient les portes fermées). Comme ça, il ne fatiguera pas ni ne chauffera.
Mes sous-marins en état de marche :
Un Surcouf, un Seaview, une Flying sub, un Minisub, un subracer.
Autres modèles : quadricoptère MiniDex amphibie full carbon, Quad Alien 680 pliable slowfly + Gopro
J-Pay quad 250 racer, Hexacoptère Typhoon H Yunnec.
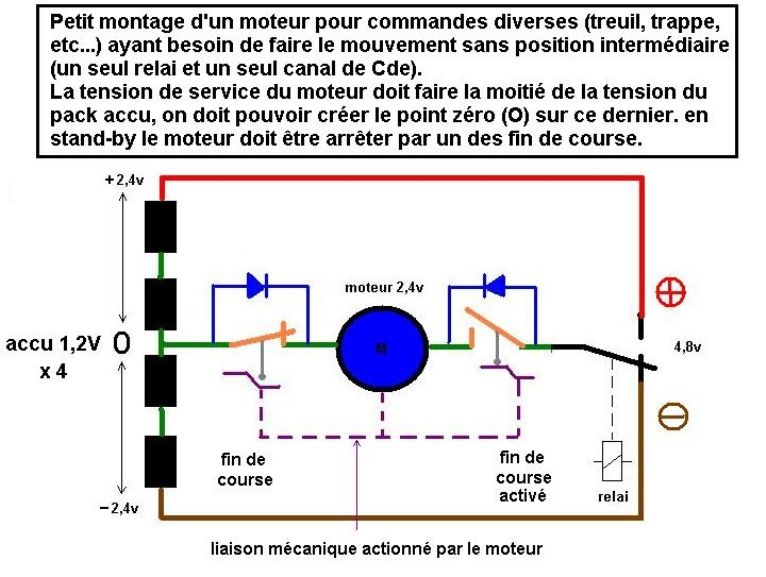
Voici une autre solution, celle-ci a été mise au point pour un moteur de faible tension ou sous alimenté.
le principe des fin de course reste identique, par contre un relai inverseur unipolaire suffit !
Je retiens. Mais dans ce système il faut impérativement un pack d'accus avec un nombre pair d'éléments.
Sinon, c'est en effet très simple d'utilisation. Un simple inter 2rt suffit à le faire fonctionner.
Mes sous-marins en état de marche :
Un Surcouf, un Seaview, une Flying sub, un Minisub, un subracer.
Autres modèles : quadricoptère MiniDex amphibie full carbon, Quad Alien 680 pliable slowfly + Gopro
J-Pay quad 250 racer, Hexacoptère Typhoon H Yunnec.
Suite des évènements.
Le servo, ce n'est pas le top pour cette application malgré que ça marche.
Je retourne vers ma bonne vieille tige filetée. Pourquoi ? Tout simple que j'ai plus de couple en fin de course sans forcer.
Et bonne nouvelle, je crois avoir trouvé mon bonheur chez Sélectronic (micro moteur gm12 modèle 071). Il est tout et semble avoir du couple et une vitesse qui à vue de nez me convient.
Je pense pouvoir y adapter sans problème un pignon de sortie de servo, un deuxième identique sur ma tige (il y est déjà en fait) et on passe au essais.
Je téléphonerai demain au magasin pour savoir si il est en stock et je passerai le prendre le soir après le boulot (pratique, c'est sur une des lignes de métro que je fréquente).
La suite demain et peut-être la fin de l'histoire.
Mes sous-marins en état de marche :
Un Surcouf, un Seaview, une Flying sub, un Minisub, un subracer.
Autres modèles : quadricoptère MiniDex amphibie full carbon, Quad Alien 680 pliable slowfly + Gopro
J-Pay quad 250 racer, Hexacoptère Typhoon H Yunnec.
Salut tout le monde.
Tout est bien qui finit bien.
Pas de problèmes pour le montage. Le micro motoréducteur remplit bien son office. Je le recommande. Il est suffisamment puissant et rapide pour entrainer la tige filetée et nettement moins bruyant que l'ancien moteur. Les portes du hangar sont de nouveau fonctionnelles.
Comme le soum est ouvert, ce soir, je m'attaque au remplacement des moteurs de propulsion qui sont usés jusqu'à la corde. Ce n'est plus du jeu qu'il y a dans les paliers, mais un goufre.
Mes sous-marins en état de marche :
Un Surcouf, un Seaview, une Flying sub, un Minisub, un subracer.
Autres modèles : quadricoptère MiniDex amphibie full carbon, Quad Alien 680 pliable slowfly + Gopro
J-Pay quad 250 racer, Hexacoptère Typhoon H Yunnec.