Tout beau Gilles , bravo !
A+ philippe
SEEHUND XXVII B

Re: SEEHUND XXVII B
Merci les gars pour votre suivi.
Dimanche dernier ce fut les essais officiels dans la grand bain à Châteaurenard.
Les premiers soucis n'ont pas tardés.
Le plus important c'est l’anti couple généré par le moteur qui fait pencher le petit soum.
Aussi en rentrant et aprés réflexion ,la solution est simple,il va falloir réduire la propulsion.
On va donc passer sur un micro moteur
Jusqu'à maintenant il y avait ça, avec 8.8grs.

Voici le petit nouveau, avec 2.5grs, soit quasiment 4 fois plus léger.

Le gros soucis avec ces moteurs c'est le variateur, car ils fonctionnent sous une tension maxi de environ 4v, au delà ,ça sent vite la fumée.
Mais en réfléchissant un peu j'ai fait d'une pierre ,deux coup.
En fait c'est grâce à la discussion que nous avons eu avec Téba sur la transformation d'un gros servo pour en faire un treuil que l'idée m'est venue.
J'ai utilisé l’électronique d'un micro servo pour piloter le moteur.
Le point mort se règle avec le potentiomètre d'origine ensuite on dispose d'une marche avant et arrière progressive le tout sous 4.8v maxi.
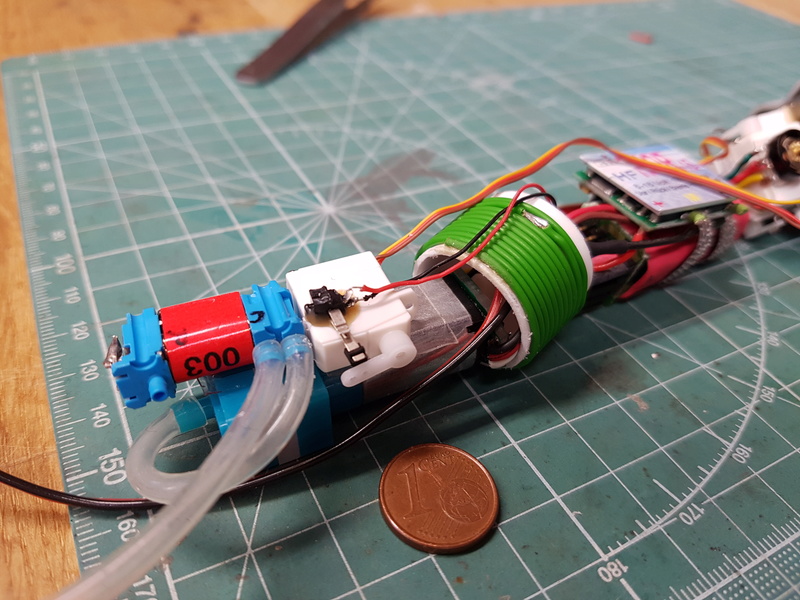
Voila le truc,
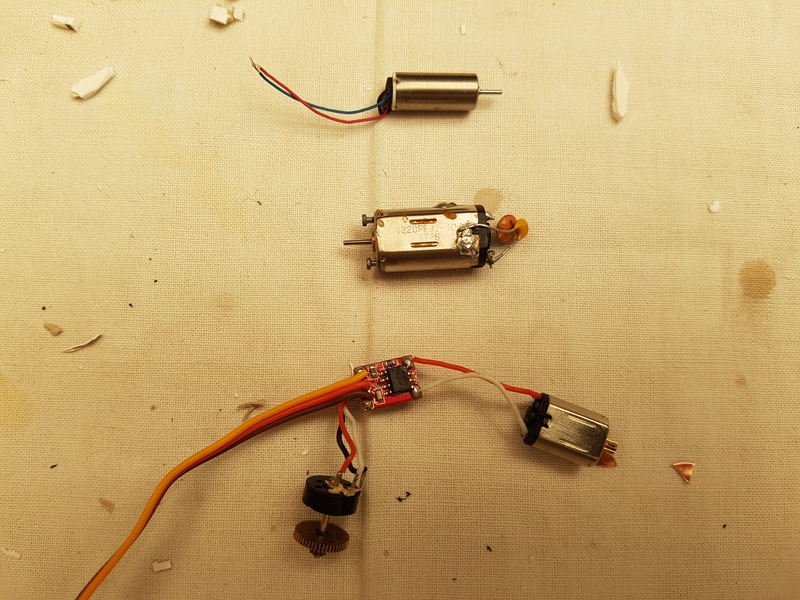
En haut le micro moteur,dessous le moteur,et en bas l’électronique du servo, encore accroché a son moteur d'origine.
Les essais sont prometteurs et l’intégration c'est bien passée.
Une vue de l'ensemble, avec l'ancien variateur qui ne me sert pour l'instant que pour son bec..
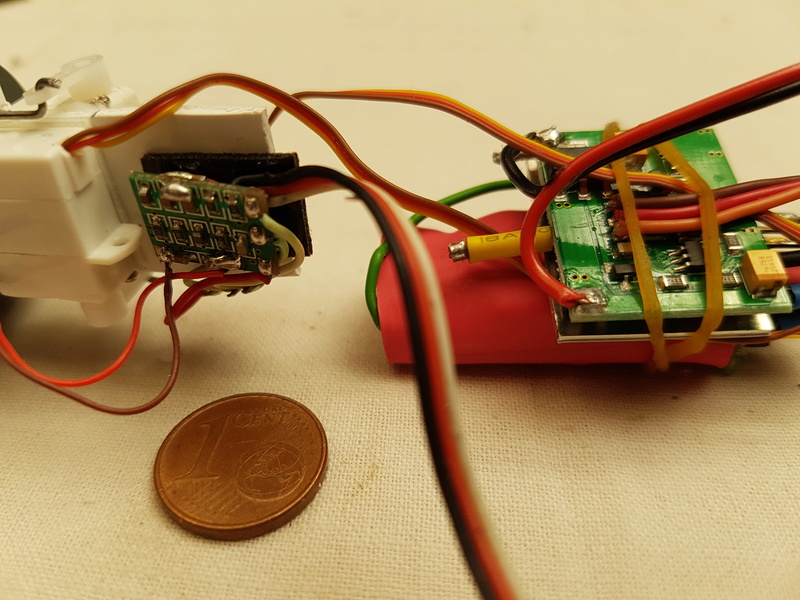
Avec cette solution je récupère du poids utilisable pour le fonctionnement en statique, mais dans l'immédiat on finalise le soum avec une plongée dynamique.
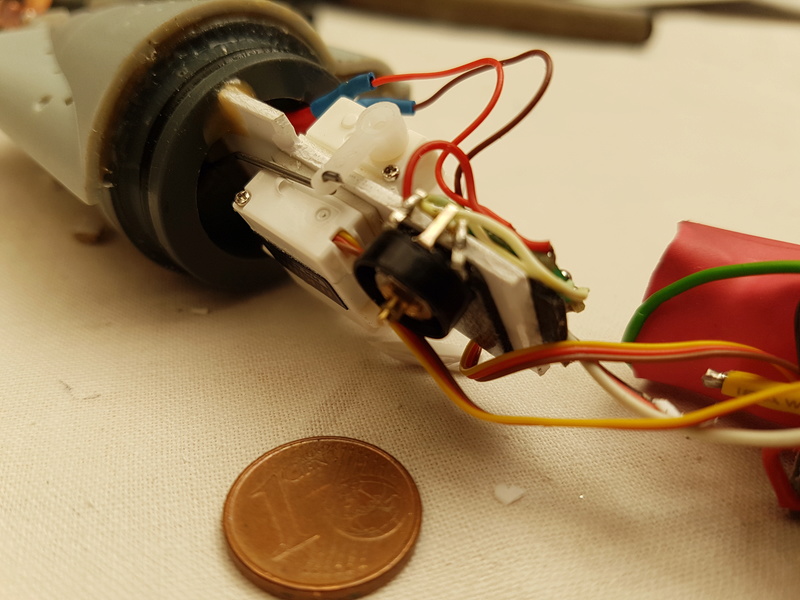
J'ai également passé le lest sous la coque afin de gagner sur le comportement du bestiau.

Voila, la bonne nouvelle c'est que le centre d'essai vient de ré-ouvrir , par contre pour le temps il va falloir attendre un peu. 

Alors peu être à mardi pour les essais.
A+
Dimanche dernier ce fut les essais officiels dans la grand bain à Châteaurenard.
Les premiers soucis n'ont pas tardés.
Le plus important c'est l’anti couple généré par le moteur qui fait pencher le petit soum.
Aussi en rentrant et aprés réflexion ,la solution est simple,il va falloir réduire la propulsion.
On va donc passer sur un micro moteur
Jusqu'à maintenant il y avait ça, avec 8.8grs.
Voici le petit nouveau, avec 2.5grs, soit quasiment 4 fois plus léger.
Le gros soucis avec ces moteurs c'est le variateur, car ils fonctionnent sous une tension maxi de environ 4v, au delà ,ça sent vite la fumée.
Mais en réfléchissant un peu j'ai fait d'une pierre ,deux coup.
En fait c'est grâce à la discussion que nous avons eu avec Téba sur la transformation d'un gros servo pour en faire un treuil que l'idée m'est venue.
J'ai utilisé l’électronique d'un micro servo pour piloter le moteur.
Le point mort se règle avec le potentiomètre d'origine ensuite on dispose d'une marche avant et arrière progressive le tout sous 4.8v maxi.
Voila le truc,
En haut le micro moteur,dessous le moteur,et en bas l’électronique du servo, encore accroché a son moteur d'origine.
Les essais sont prometteurs et l’intégration c'est bien passée.
Une vue de l'ensemble, avec l'ancien variateur qui ne me sert pour l'instant que pour son bec..
Avec cette solution je récupère du poids utilisable pour le fonctionnement en statique, mais dans l'immédiat on finalise le soum avec une plongée dynamique.
J'ai également passé le lest sous la coque afin de gagner sur le comportement du bestiau.
Voila, la bonne nouvelle c'est que le centre d'essai vient de ré-ouvrir
Alors peu être à mardi pour les essais.
A+

Re: SEEHUND XXVII B
Ave Gilles.
De ces moteurs, il en existe de toutes les puissances en nanos quads en 1S.
Donc, comme je vois que tu l'as prévu "remplaçable", tu pourrais tester diverses configurations de coreless niveau puissance et Kv.
A toi de voir ensuite comment le faire durer en immersion.
Pour les miens (ex), WD40 après navigation.
De ces moteurs, il en existe de toutes les puissances en nanos quads en 1S.
Donc, comme je vois que tu l'as prévu "remplaçable", tu pourrais tester diverses configurations de coreless niveau puissance et Kv.
A toi de voir ensuite comment le faire durer en immersion.
Pour les miens (ex), WD40 après navigation.
Mes sous-marins en état de marche :
Un Surcouf, un Seaview, une Flying sub, un Minisub, un subracer.
Autres modèles : quadricoptère MiniDex amphibie full carbon, Quad Alien 680 pliable slowfly + Gopro
J-Pay quad 250 racer, Hexacoptère Typhoon H Yunnec.
Un Surcouf, un Seaview, une Flying sub, un Minisub, un subracer.
Autres modèles : quadricoptère MiniDex amphibie full carbon, Quad Alien 680 pliable slowfly + Gopro
J-Pay quad 250 racer, Hexacoptère Typhoon H Yunnec.

Re: SEEHUND XXVII B
Bonjour,
Content d'avoir participé involontairement.
Content d'avoir participé involontairement.
Re: SEEHUND XXVII B
Coucou Gilles ,
merci pour ces infos , je pense retarder un peu la construction du mien....par contre sur le playmobil , j'ai utilisé un temps , les contrôleurs de servo .
il faut remettre au neutre assez souvent ....mais sinon ça fonctionne .par contre pas simple pour la navigation , la marche arrière est plus difficile à avoir !
bon courage pour la suite
A+ Phil
merci pour ces infos , je pense retarder un peu la construction du mien....par contre sur le playmobil , j'ai utilisé un temps , les contrôleurs de servo .
il faut remettre au neutre assez souvent ....mais sinon ça fonctionne .par contre pas simple pour la navigation , la marche arrière est plus difficile à avoir !
bon courage pour la suite
A+ Phil

Re: SEEHUND XXVII B
moi je dis comme d'hab mon lapin !
mais j'aimerai bien ton "taille crayon de doigts" pake je suis sur que tu aiguises tes grosses pattasses pour faire dans le "macro soum" !
mais j'aimerai bien ton "taille crayon de doigts" pake je suis sur que tu aiguises tes grosses pattasses pour faire dans le "macro soum" !
Listen to music and have Fun !
Re: SEEHUND XXVII B
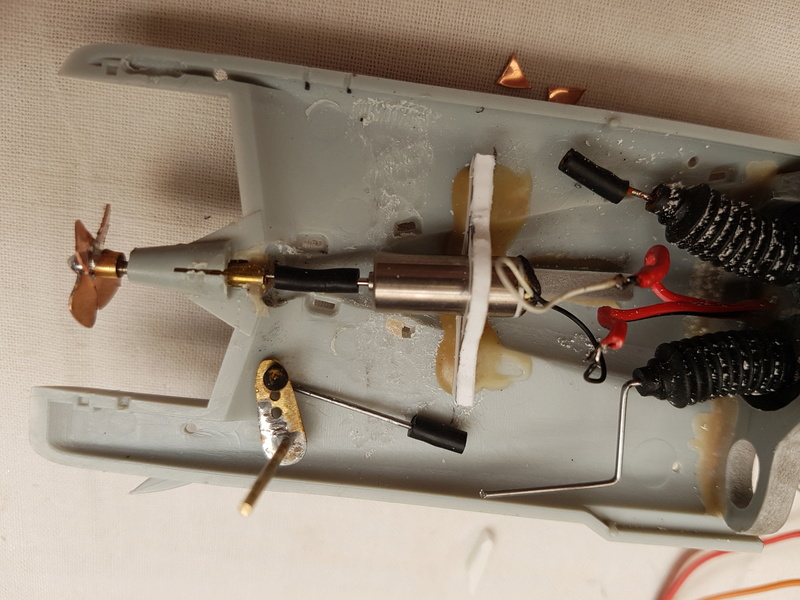
Bonjour à tous,le montage du Seehund continu avec son lot de soucis divers et variés.
Pour commencer après essais le micromoteur ne va pas du tout, dés que l'hélice est dans l'eau le régime descend au ralenti, donc il me reste la solution intermédiaire,c'est à dire le moteur d'origine du servo.
.
Nouvel essai ,et là miracle la vitesse est très réaliste, par contre la capacité a effectuer une plongée dynamique est à oublier .
Donc il va falloir passer aux choses sérieuses avec le ballast statique.
Avant de passer encore quelques heures sur la nano pompe péristaltique, j'ai voulu établir le poids de flotte nécessaire pour passer de la flotaison au "coulage", verdict 19grs.

Afin de réaliser le ballast d'essai, j'ai utilisé un tube d'aspirine que j'ai coupé afin qu'il renferme 19 grs de flotte, et la catastrophe, le volume pour faire entrer la pompe et le ballast est bien trop petit.
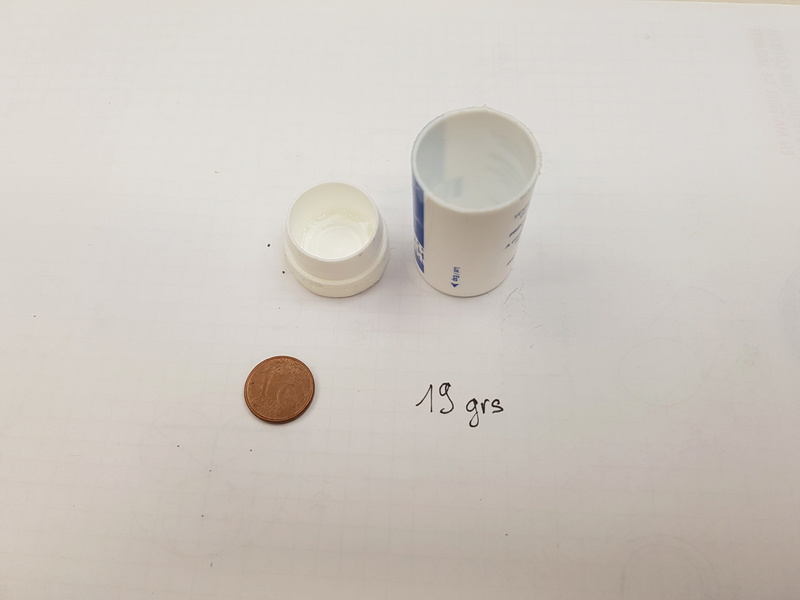
Il va falloir faire chauffer les neurones car il est hors de question que le bestiau ne sache nager qu'en surface.
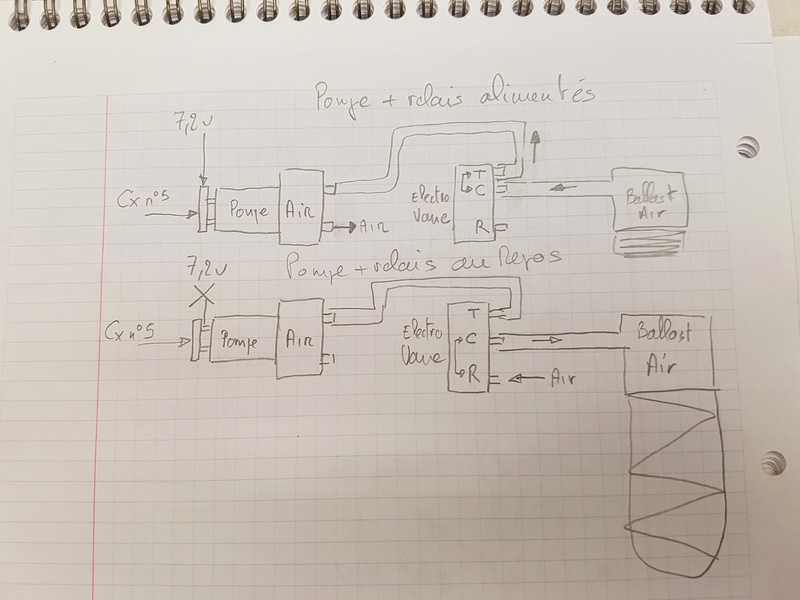
Je suis reparti de l'idée de Philippe, en résumé une pompe à air,une électrovanne, etc..
Par chance j'ai pu regagner du poids avec le petit moteur et le variateur, aussi avant d'aller trés loin j'ai voulu vérifier que la pompe à air pourrait pressuriser le compartiment étanche.
J'ai fait un petit montage avec un doigt de gant en latex.
L'idée sera de mettre un doigt dans chaque torpille.
Pour plonger il faudra que la pompe puisse vider l'air et pressuriser le compartiment étanche.
Voici le ballast plein d'air
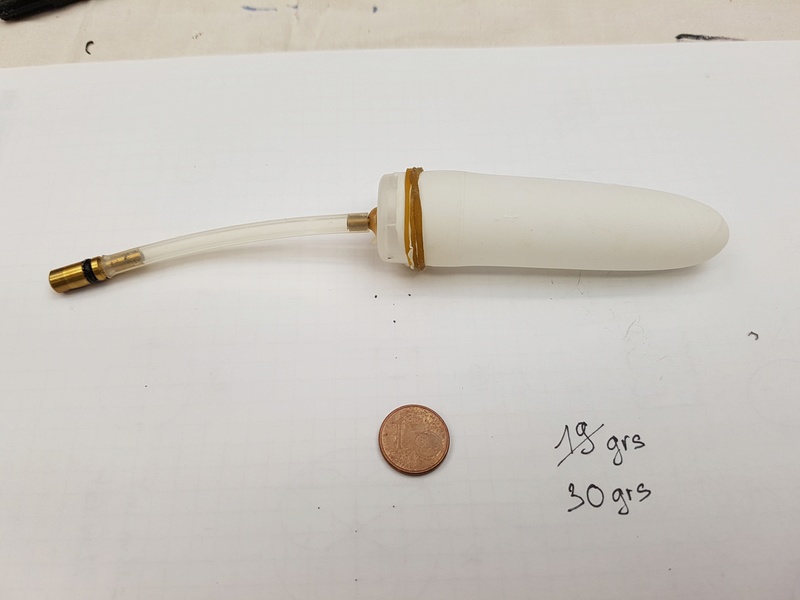
puis vidé de son air
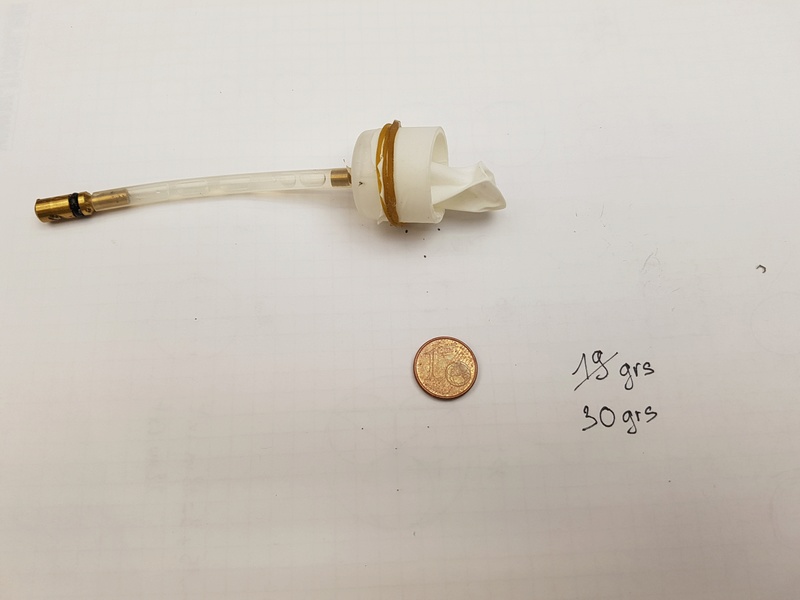
Et la enfin une bonne nouvelle la pompe arrive a "sécher"le gant dont la contenance est de 30grs d'eau.
Donc je vais croiser les doigts et monter tout ce petit monde dans la bébette.
A terme les doigts de gant seront remplacés par deux ballons de baudruche, reste à espérer que l'équilibrage de l'ensemble soit pas trop galère.
Pour finir un petit croquis du fonctionnement.
Voila ,la suite au prochain numéro
Pour commencer après essais le micromoteur ne va pas du tout, dés que l'hélice est dans l'eau le régime descend au ralenti, donc il me reste la solution intermédiaire,c'est à dire le moteur d'origine du servo.
.Nouvel essai ,et là miracle la vitesse est très réaliste, par contre la capacité a effectuer une plongée dynamique est à oublier .
Donc il va falloir passer aux choses sérieuses avec le ballast statique.
Avant de passer encore quelques heures sur la nano pompe péristaltique, j'ai voulu établir le poids de flotte nécessaire pour passer de la flotaison au "coulage", verdict 19grs.
Afin de réaliser le ballast d'essai, j'ai utilisé un tube d'aspirine que j'ai coupé afin qu'il renferme 19 grs de flotte, et la catastrophe, le volume pour faire entrer la pompe et le ballast est bien trop petit.
Il va falloir faire chauffer les neurones car il est hors de question que le bestiau ne sache nager qu'en surface.
Je suis reparti de l'idée de Philippe, en résumé une pompe à air,une électrovanne, etc..
Par chance j'ai pu regagner du poids avec le petit moteur et le variateur, aussi avant d'aller trés loin j'ai voulu vérifier que la pompe à air pourrait pressuriser le compartiment étanche.
J'ai fait un petit montage avec un doigt de gant en latex.
L'idée sera de mettre un doigt dans chaque torpille.
Pour plonger il faudra que la pompe puisse vider l'air et pressuriser le compartiment étanche.
Voici le ballast plein d'air
puis vidé de son air
Et la enfin une bonne nouvelle la pompe arrive a "sécher"le gant dont la contenance est de 30grs d'eau.
Donc je vais croiser les doigts et monter tout ce petit monde dans la bébette.
A terme les doigts de gant seront remplacés par deux ballons de baudruche, reste à espérer que l'équilibrage de l'ensemble soit pas trop galère.
Pour finir un petit croquis du fonctionnement.
Voila ,la suite au prochain numéro
Re: SEEHUND XXVII B
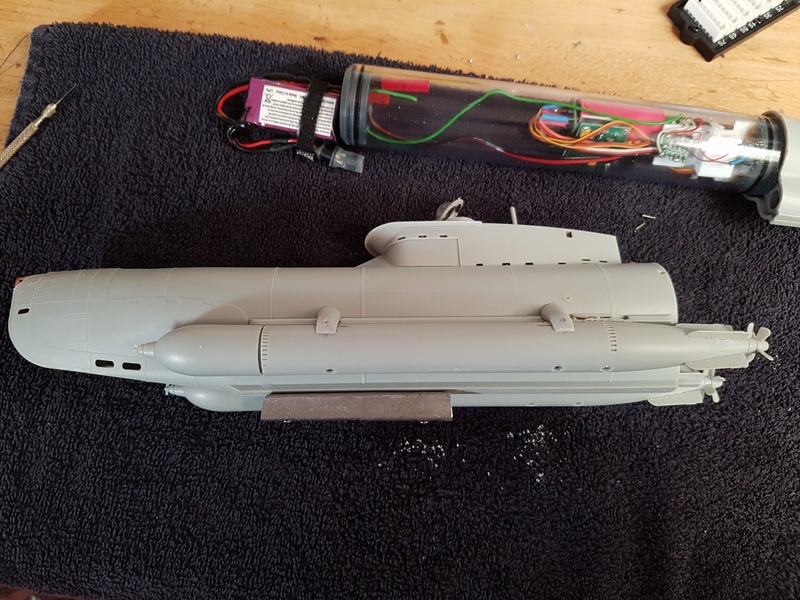
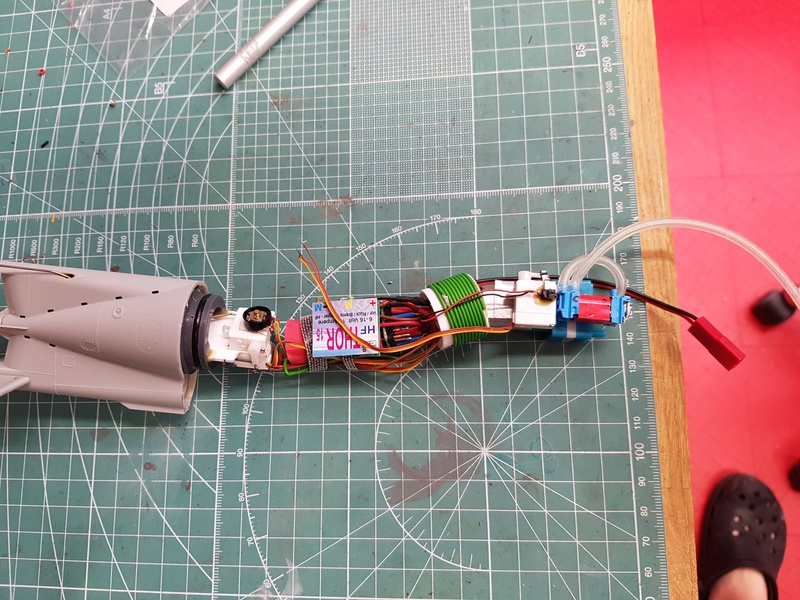
Bonjour, la suite du montage avec intégration de la pompe à air, son interface de commande , un nano servo équipé d'un nano contact pour piloter la nano électrovanne et la nano électrovanne.
Ça fait beaucoup de nano, et des maxi contractures des doigts.
Allez 2 petites images pour donner une idée.
Il me reste à câbler le nano servo sur le récepteur et l' électrovanne, après c'est essais en piscine en espérant que tout ne va pas aller directement au fond
A plus
Ça fait beaucoup de nano,
Allez 2 petites images pour donner une idée.
Il me reste à câbler le nano servo sur le récepteur et l' électrovanne, après c'est essais en piscine en espérant que tout ne va pas aller directement au fond
A plus
Re: SEEHUND XXVII B
Alors, bientôt ses 1ers tours d'hélice dans l'évier ?
Mes sous-marins en état de marche :
Un Surcouf, un Seaview, une Flying sub, un Minisub, un subracer.
Autres modèles : quadricoptère MiniDex amphibie full carbon, Quad Alien 680 pliable slowfly + Gopro
J-Pay quad 250 racer, Hexacoptère Typhoon H Yunnec.
Un Surcouf, un Seaview, une Flying sub, un Minisub, un subracer.
Autres modèles : quadricoptère MiniDex amphibie full carbon, Quad Alien 680 pliable slowfly + Gopro
J-Pay quad 250 racer, Hexacoptère Typhoon H Yunnec.

Re: SEEHUND XXVII B
Attention de ne pas le perdre dans le nano siphonpierre a écrit :Alors, bientôt ses 1ers tours d'hélice dans l'évier ?
Super boulot
Haddock : Messieurs, Cet homme est innocent : Tintin nous l’a dit. Allez-vous lui laisser ces menottes… et l’empêcher d’aller me chercher une bouteille de cognac ?