Sécurités de l'U-47 et du LAUBIE
Publié : 01 mai 2013 19:06
Bonjour tout le monde ! 
Comme annoncé précédemment, je mets en ligne les schémas et plans des circuits que j’ai développés pour assurer les sécurités de mes sous-marins U-47 et LAUBIE.
Ce sont les mêmes qui équiperont mon RUBIS, actuellement en construction.
Je tiens à préciser que les solutions adoptées ne sont certainement pas la panacée, mais elles conviennent parfaitement au type de sous-marins que je construis (propulsion de faible puissance et ballast à poche) et ont démontré une grande fiabilité, à condition, bien sur, de rester vigilant quant à l’état de la batterie de secours !!!
Il y a trois sécurités qui agissent toutes sur le ballast, les barres de plongée et la propulsion dans un cas, soit :
- un dispositif de surveillance de la (ou des) batterie(s) principale(s) avec basculement automatique sur une batterie de secours lorsque la tension passe en dessous d’un seuil préréglé.
- Un fail-safe qui détecte toute perturbation radio.
- Une détection de voie d’eau.
Les trois sécurités ont les effets suivants :
- vidange du ballast pendant trente secondes.
- coupure de l’alimentation de la pompe dans le sens remplissage uniquement, la vidange restant opérationnelle.
- Blocage des barres arrière au neutre et des barres avant en position cabrée, position visible d’assez loin pour comprendre qu’il y a un problème !
- Blocage à l’arrêt de la propulsion dans le cas de la perte radio uniquement.
Suivant la sécurité qui a déclenché, il y a trois possibilités de redémarrage :
- En cas de perte radio, si le signal réapparaît « propre », le système se réarme automatiquement et la navigation redevient possible dans les conditions normales.
- En cas de panne batterie(s), une mise hors tension pendant quelques instants du sous-marin suivie de sa remise sous tension, permet de réarmer le dispositif, jusqu’à la prochaine manœuvre qui va consommer suffisamment de courant pour refaire basculer la sécurité. On sait alors que la seule autonomie disponible est celle de la batterie de secours….
- En cas de voie d’eau, la mise hors tension puis sous tension du sous-marin ne réarme pas la sécurité et il faut « dare dare » le sortir de l’eau pour éviter le naufrage !!!
En voici le schéma bloc.
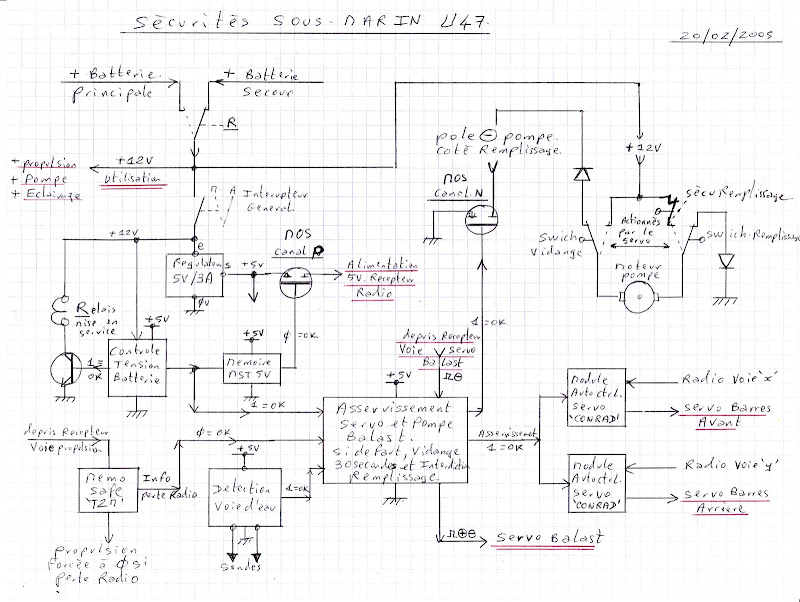
On remarque que la radio est alimentée via un transistor MOS canal « P », uniquement si tout se passe bien à la mise sous tension ; donc, pas de mise en marche en cas de problème sur la batterie de secours !
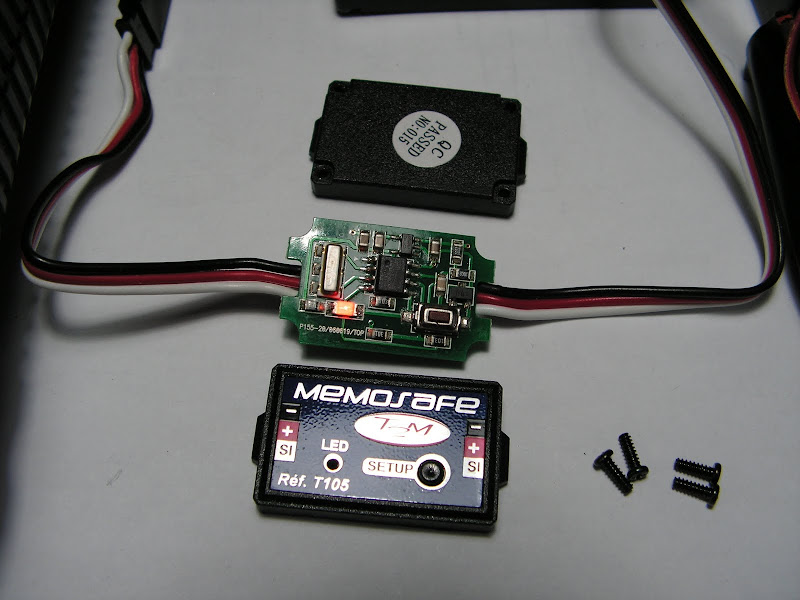
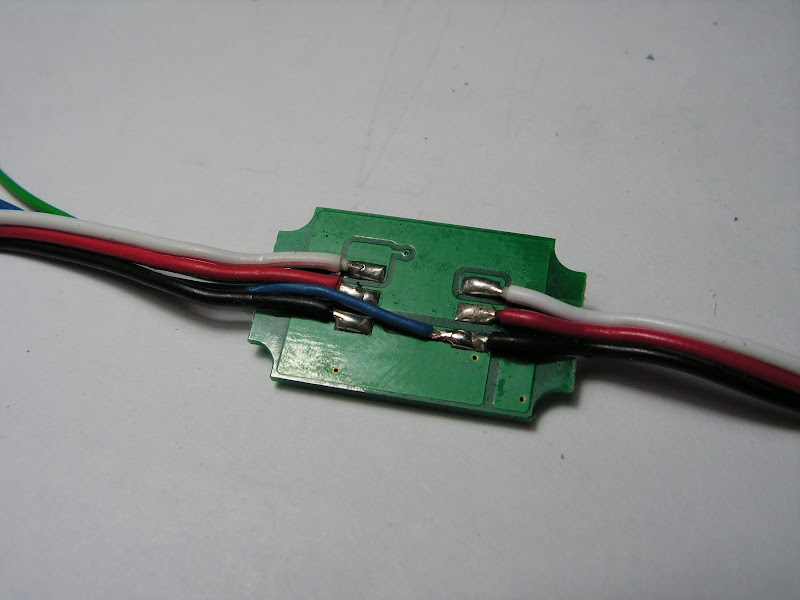
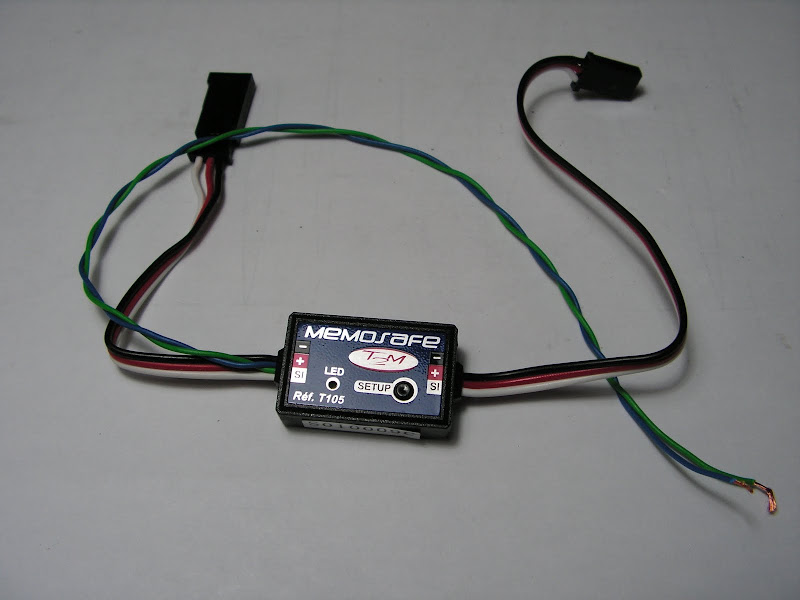
Le fail-safe de marque T2M a été ouvert pour souder un fil au niveau de sa led de signalisation, ce qui permet d’en extraire l’information de perte radio ; ce point sera vu plus tard.
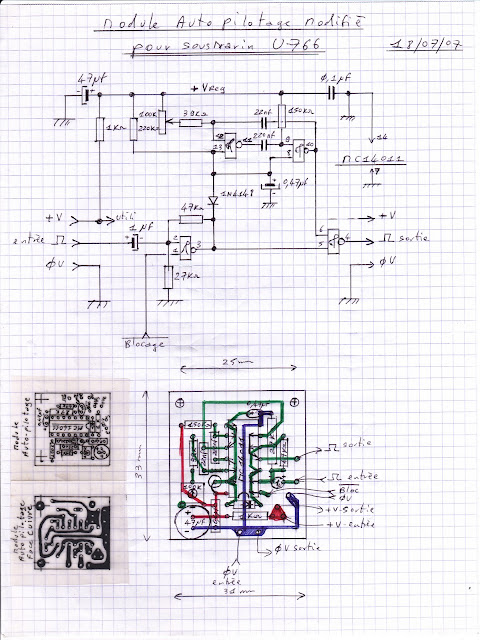
Deux modules d’auto pilotage d’origine Conrad, on subit une petite modification qui permet de les forcer à la position voulue par un signal extérieur.
A savoir, lorsque j’ai réalisé l’électronique de mon LAUBIE, ces circuits étaient devenus introuvables ; je les ai donc reproduit, comme l’a fait notre ami Laurent !
Voyons maintenant chaque élément, en commençant par la sécurité batterie !
L’U-47 ne comporte que 4 servos et pas de gadgets, ce qui autorise une alimentation de type « Ubec » à partir de la batterie principale 12 volts ; le LAUBIE avec ses 8 servos et accessoires divers m’a contraint à installer une batterie 6 volts en plus de la batterie principale de 12 volts. La carte électronique est donc une version modifiée qui surveille simultanément les deux batteries.
Dans les deux cas, la batterie de secours est, bien entendu, en 12 volts.
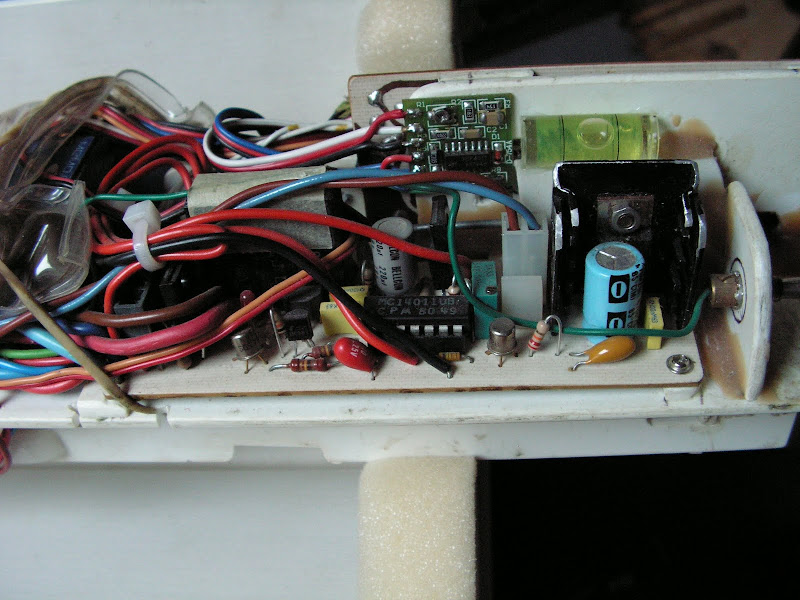
Voici une photo de la carte en place sur l’U-47 :
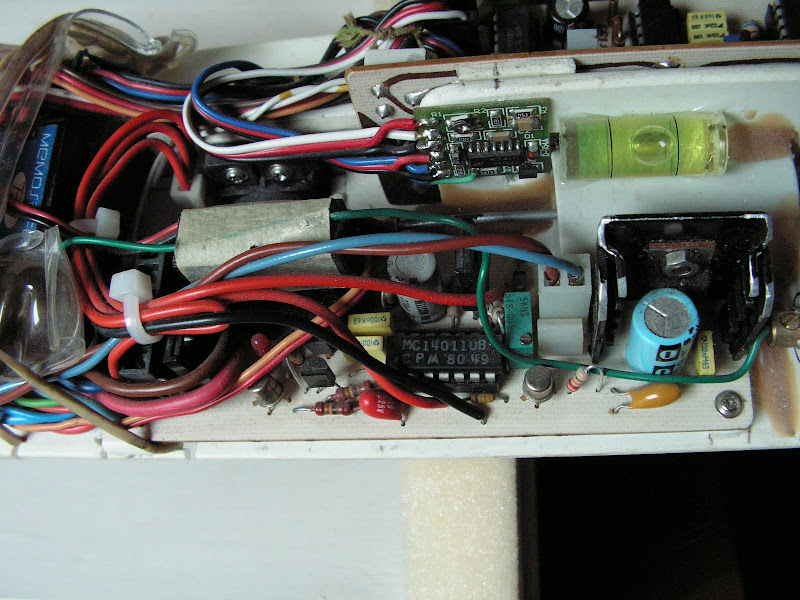
On remarque à droite le refroidisseur du régulateur 5 volts 3 ampères et la petite carte d’auto-pilotage des barres avant, collée sur le bâti central à gauche du niveau à bulle.
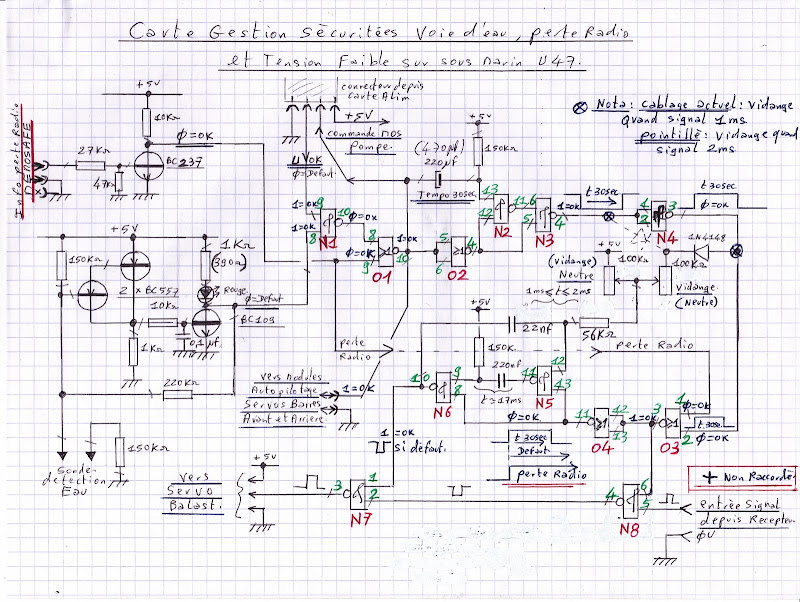
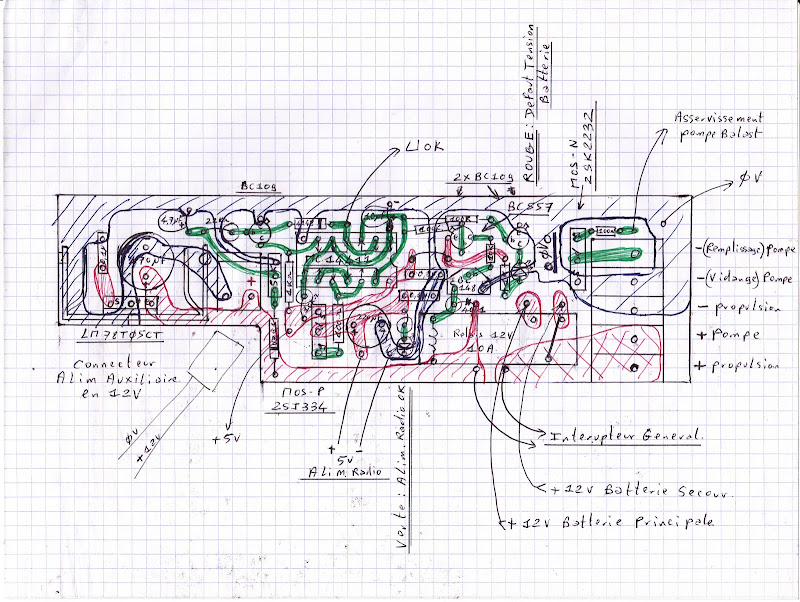
Et voici le schéma de principe de la carte de l’U-47 :

Le cœur du système est une quadruple porte Nand à deux entrée, référence MC14011 ou CD4011.
Petit rappel sur le fonctionnement de la porte logique Nand, pour ceux qui ne connaissent pas; rassurez vous, ce n’est pas une tare !!!!
C’est une fonction « ET » inversée et, dans notre cas, il y a quatre possibilités pour influencer sa sortie :
- Les deux entrées à l’état logique « zéro » donnent un état « 1 » en sortie.
- les deux entrées à l’état logique « 1 » donnent un état logique « zéro » en sortie.
- enfin, l’une des entrées à « 1 » et l’autre à « zéro » donne, dans les deux cas possibles, un état logique « 1 » en sortie.
A la mise sous tension par l’interrupteur général (qui peut être remplacé par un inter magnétique), le relais « R » est au repos. C’est donc la batterie de secours qui est sollicitée.
Si elle n’est pas en état, on ne va pas plus loin, car le circuit ne va ni faire coller le relais, ni alimenter la radio. Retour à la case atelier !
A contrario, si la batterie de secours est en état, le régulateur 5 volts « LM78T05ET » alimente la carte électronique ; puisque la tension de la batterie est correcte, la diode Zéner « VZ 9,1 volts » est passante et alimente le transistor BC109 (à gauche) qui se sature. Son collecteur est alors ramené au niveau « zéro » ainsi qu’une entrée de la première porte Nand, ce qui a pour effet de forcer sa sortie à l’état logique « 1 ».
Pendant ce temps, la ligne marquée « RAZ » passe de zéro volts à 5 volts suivant la charge du condensateur de 10 µF. Ce temps de charge est suffisant pour permettre le verrouillage du système.
Car, à la fin de ce temps de RAZ, si la sortie de la première Nand est bien au niveau « 1 », la sortie de la deuxième va basculer à l’état zéro, puisque ses deux entrées sont à « un », forçant ainsi la sortie de la troisième Nand à « 1 » et la sortie de la quatrième à « 0 ».
Chaque sortie de Nand a une utilité précise :
- la première s’en va vers la carte qui centralise les défauts et autorise, via la diode 1N4148 qui est non passante dans ce cas, le fonctionnement normal du premier transistor BC109.
- la deuxième alimente d’une part le deuxième transistor BC109 qui allume la led rouge en cas de défaut, et, d’autre part, les transistors BC557 et BC148B montés en « Darlington inverseur » qui alimentent le relais « R ». Celui-ci bascule et commute le circuit sur la batterie principale. Le condensateur de 470 µF sert à filtrer les variations de tension et, surtout, alimente le circuit pendant les quelques millisecondes du basculement du relais.
-la quatrième alimente par son niveau « Zéro » la grille du FET MOS canal « P » 2SJ334 qui devient conducteur et alimente la radio.
Tant que la batterie principale présente une tension suffisante, la diode zéner VZ 9,1 volts est passante et alimente le premier transistor BC109. Le seuil de basculement est réglé par le petit ajustable de 5 k.Ohm et le condensateur de 4,7 µF limite la sensibilité du système ; sans lui, la moindre variation de tension engendrée par un démarrage « à donf » de la propulsion ferait basculer la sécurité !
Lorsque la tension baisse durablement, la diode zéner se bloque, et le transistor BC109 n’est plus alimenté.
Il se bloque à son tour et la résistance d’1 k.Ohm alimente l’entrée de la première Nand. Comme un et un font zéro, sa sortie bascule et verrouille le transistor BC109 par l’intermédiaire de la diode ; pas de retour en arrière possible !
Ce changement d’état de la première sortie informe, d’une part, la carte qui centralise les défauts et, d’autre part, fait basculer la sortie de la deuxième Nand, puisque un et un donnant Zéro sur la 1ère, « Zéro » et « un » sur la 2ème donne « un » sur sa sortie : le deuxième transistors BC109 est alimenté, la led rouge s’allume et le « Darlington inverseur » n’est plus alimenté, le relais « R » retombe.
C’est donc la batterie de secours qui alimente le sous-marin.
On notera que les troisième et quatrième Nands ne bougent pas car elles forment une fonction mémoire par la recopie du zéro présent en sortie de la 4ème sur une entrée de la 3ème ; ce « Zéro » force le « un » sur la porte suivante.
Cette mémoire garantie l’alimentation de la radio commande et on peut rentrer au port tranquillement au lieu de rester planté au milieu de l’étang !!! L’honneur est sauf !!!!
On remarquera sur la droite du schéma, le FET MOS canal « N » qui assure l’alimentation de la pompe de ballast dans le sens remplissage; sa présence sur cette carte est due simplement à la place disponible et aux connections électriques qu’il assure.
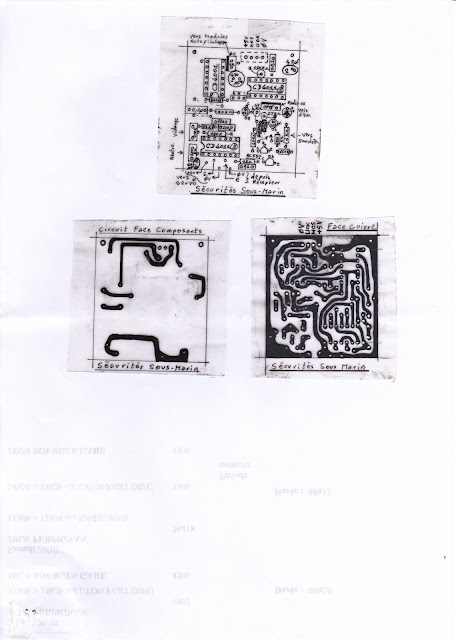
Lorsque je conçois un circuit imprimé, le montage étant au point et les composant définis, je réalise le dessin à l’échelle « 2 » de la plaquette imprimée vue face composants; le circuit imprimé est vu par transparence en respectant le code de couleur suivant :
Sont tracés en rouge les pistes véhiculant du « plus », en bleu celles qui véhiculent du « moins » et en vert toutes les autres.
Cette étape permet de vérifier la faisabilité, car mes circuits sont tous réalisés à la main avec le stylo adapté !
Le circuit imprimé à l’échelle 2 :
Tous les composants sont marqués; certains sont montés « debout », d’autres couchés. Le relais est un modèle capable de commuter 10 ampères, ce qui n’est pas excessif, car il ne faut pas oublier qu’il bascule sur la batterie de secours pendant une consommation de courant….
Aussi, pour des modèles plus gourmands, il ne faut pas hésiter à monter un relais capable de commuter 16 ou 20 ampères ! Attention toutefois à s’assurer que la bobine ne présente pas une résistance trop faible qui obligerait à remplacer le transistor BC148B par un modèle plus costaud…
Le connecteur représenté à gauche permet d’alimenter des auxiliaires ayant une faible consommation, les feux de position du sous-marin, dans mon cas.
Et voici les calques à l’échelle « 1 » du circuit imprimé, face circuit et face composants.

La réalisation ne présente pas de difficultés majeures et je n’ai pas établi de liste de composants, vu leur faible nombre.
Il faut juste veiller à utiliser des condensateurs avec leur tension de service adaptée, soit pour le 470 µF au moins 16 volts et 6 volts pour tous les autres.
Le circuit intégré MC14011 est monté sur support, bien que cela ne soit pas indispensable; c’est un composant robuste que je n’ai pas encore changé !
Toutes les résistances sont des ¼ de Watt à couche métallique.
Les FET MOS utilisés sont dit « à niveau logique », c'est-à-dire que leur grille est compatible avec les niveaux de tension des circuits intégrés, et il sont en boîtier TO220 isolé, ce qui évite tout risque de court circuit avec un autre composant implanté à proximité. Cependant, un modèle non isolé, moins couteux, convient parfaitement mais il devra quand même être "à niveau logique"..
Quant à la mise au point, elle est extrêmement simple et nécessite seulement une alimentation réglable et un voltmètre.
Après les vérifications d’usage (absence de courts circuits entre des pistes du CI, sens du circuit intégré…), la batterie de secours correctement chargée est branchée sur la carte. L’alimentation, réglée à 12 volts, est branchée à la place de la batterie principale.
Lors de la mise sous tension, le relais doit coller et, si on a de la chance, il le reste !
Sinon, à l’aide du voltmètre, vérifier la tension aux bornes du condensateur de 4,7 µF ; si elle est inférieure à 0,8 volt, tourner le petit ajustable de 5 K.ohm jusqu’à dépasser cette tension puis mettre hors tension la carte.
Attendre quelques secondes, nécessaires à la décharge du condensateur de RAZ, et remettre sous tension.
Le relais doit coller et le rester !
Maintenant, baisser doucement le réglage de l’alimentation jusqu’à 10 volts, tension minimum acceptable par des éléments NICD ou NIMH.
Si on a beaucoup de chance, le relais bascule dans cette zone, sinon, tourner le petit ajustable 5 K.ohm jusqu’à obtenir le basculement du relais : c’est réglé !
Vérifier le fonctionnement en réarmant plusieurs fois la carte, dans un premier temps sans bouger le réglage de l’alimentation : le relais colle et retombe aussitôt.
Puis en réglant l’alimentation à 12 volts, réarmement de la carte par mise hors puis sous tension, et baisse de la tension jusqu’à 10 volts : le relais doit basculer à tous les coups.
La carte est opérationnelle !
En cas de non fonctionnement, très improbable, il faut revérifier le circuit, le sens des composants, les soudures, les branchements et contrôler au voltmètre la présence de tension sur la carte....
Pour les cas désespérés, me contacter !!!!
Ceci clôt le premier post; le prochain, à venir bientôt, traitera de la carte qui regroupe les trois sécurités et de l’adaptation du Fail-Safe.
En attendant, voici quelques photos de l’installation sur l’U-47…
Autre vue de la carte d’alimentation; elle est implantée à l’avant droit du bâti. On remarque tout à droite, le connecteur d’antenne radio et à gauche, l’extrémité de la poche ballast, retenue par un élastique.
Vue de dessous à l’avant du bâti ; c’est chargé !

On remarque dans le bas de l’image, le second module d’auto pilotage, associé aux barres de plongée arrière.
Au premier plan, le petit connecteur jaune permet de brancher les sondes de détection d’eau.
La carte de gestion des sécurités est à peine visible entre les montants du bâti !
Les tubes IRO gris visibles à gauche contiennent les éléments de la batterie principale….
A bientôt pour la suite !
Cordialement de Jacky-Soum
Comme annoncé précédemment, je mets en ligne les schémas et plans des circuits que j’ai développés pour assurer les sécurités de mes sous-marins U-47 et LAUBIE.
Ce sont les mêmes qui équiperont mon RUBIS, actuellement en construction.
Je tiens à préciser que les solutions adoptées ne sont certainement pas la panacée, mais elles conviennent parfaitement au type de sous-marins que je construis (propulsion de faible puissance et ballast à poche) et ont démontré une grande fiabilité, à condition, bien sur, de rester vigilant quant à l’état de la batterie de secours !!!
Il y a trois sécurités qui agissent toutes sur le ballast, les barres de plongée et la propulsion dans un cas, soit :
- un dispositif de surveillance de la (ou des) batterie(s) principale(s) avec basculement automatique sur une batterie de secours lorsque la tension passe en dessous d’un seuil préréglé.
- Un fail-safe qui détecte toute perturbation radio.
- Une détection de voie d’eau.
Les trois sécurités ont les effets suivants :
- vidange du ballast pendant trente secondes.
- coupure de l’alimentation de la pompe dans le sens remplissage uniquement, la vidange restant opérationnelle.
- Blocage des barres arrière au neutre et des barres avant en position cabrée, position visible d’assez loin pour comprendre qu’il y a un problème !
- Blocage à l’arrêt de la propulsion dans le cas de la perte radio uniquement.
Suivant la sécurité qui a déclenché, il y a trois possibilités de redémarrage :
- En cas de perte radio, si le signal réapparaît « propre », le système se réarme automatiquement et la navigation redevient possible dans les conditions normales.
- En cas de panne batterie(s), une mise hors tension pendant quelques instants du sous-marin suivie de sa remise sous tension, permet de réarmer le dispositif, jusqu’à la prochaine manœuvre qui va consommer suffisamment de courant pour refaire basculer la sécurité. On sait alors que la seule autonomie disponible est celle de la batterie de secours….
- En cas de voie d’eau, la mise hors tension puis sous tension du sous-marin ne réarme pas la sécurité et il faut « dare dare » le sortir de l’eau pour éviter le naufrage !!!
En voici le schéma bloc.
On remarque que la radio est alimentée via un transistor MOS canal « P », uniquement si tout se passe bien à la mise sous tension ; donc, pas de mise en marche en cas de problème sur la batterie de secours !
Le fail-safe de marque T2M a été ouvert pour souder un fil au niveau de sa led de signalisation, ce qui permet d’en extraire l’information de perte radio ; ce point sera vu plus tard.
Deux modules d’auto pilotage d’origine Conrad, on subit une petite modification qui permet de les forcer à la position voulue par un signal extérieur.
A savoir, lorsque j’ai réalisé l’électronique de mon LAUBIE, ces circuits étaient devenus introuvables ; je les ai donc reproduit, comme l’a fait notre ami Laurent !
Voyons maintenant chaque élément, en commençant par la sécurité batterie !
L’U-47 ne comporte que 4 servos et pas de gadgets, ce qui autorise une alimentation de type « Ubec » à partir de la batterie principale 12 volts ; le LAUBIE avec ses 8 servos et accessoires divers m’a contraint à installer une batterie 6 volts en plus de la batterie principale de 12 volts. La carte électronique est donc une version modifiée qui surveille simultanément les deux batteries.
Dans les deux cas, la batterie de secours est, bien entendu, en 12 volts.
Voici une photo de la carte en place sur l’U-47 :
On remarque à droite le refroidisseur du régulateur 5 volts 3 ampères et la petite carte d’auto-pilotage des barres avant, collée sur le bâti central à gauche du niveau à bulle.
Et voici le schéma de principe de la carte de l’U-47 :
Le cœur du système est une quadruple porte Nand à deux entrée, référence MC14011 ou CD4011.
Petit rappel sur le fonctionnement de la porte logique Nand, pour ceux qui ne connaissent pas; rassurez vous, ce n’est pas une tare !!!!
C’est une fonction « ET » inversée et, dans notre cas, il y a quatre possibilités pour influencer sa sortie :
- Les deux entrées à l’état logique « zéro » donnent un état « 1 » en sortie.
- les deux entrées à l’état logique « 1 » donnent un état logique « zéro » en sortie.
- enfin, l’une des entrées à « 1 » et l’autre à « zéro » donne, dans les deux cas possibles, un état logique « 1 » en sortie.
A la mise sous tension par l’interrupteur général (qui peut être remplacé par un inter magnétique), le relais « R » est au repos. C’est donc la batterie de secours qui est sollicitée.
Si elle n’est pas en état, on ne va pas plus loin, car le circuit ne va ni faire coller le relais, ni alimenter la radio. Retour à la case atelier !
A contrario, si la batterie de secours est en état, le régulateur 5 volts « LM78T05ET » alimente la carte électronique ; puisque la tension de la batterie est correcte, la diode Zéner « VZ 9,1 volts » est passante et alimente le transistor BC109 (à gauche) qui se sature. Son collecteur est alors ramené au niveau « zéro » ainsi qu’une entrée de la première porte Nand, ce qui a pour effet de forcer sa sortie à l’état logique « 1 ».
Pendant ce temps, la ligne marquée « RAZ » passe de zéro volts à 5 volts suivant la charge du condensateur de 10 µF. Ce temps de charge est suffisant pour permettre le verrouillage du système.
Car, à la fin de ce temps de RAZ, si la sortie de la première Nand est bien au niveau « 1 », la sortie de la deuxième va basculer à l’état zéro, puisque ses deux entrées sont à « un », forçant ainsi la sortie de la troisième Nand à « 1 » et la sortie de la quatrième à « 0 ».
Chaque sortie de Nand a une utilité précise :
- la première s’en va vers la carte qui centralise les défauts et autorise, via la diode 1N4148 qui est non passante dans ce cas, le fonctionnement normal du premier transistor BC109.
- la deuxième alimente d’une part le deuxième transistor BC109 qui allume la led rouge en cas de défaut, et, d’autre part, les transistors BC557 et BC148B montés en « Darlington inverseur » qui alimentent le relais « R ». Celui-ci bascule et commute le circuit sur la batterie principale. Le condensateur de 470 µF sert à filtrer les variations de tension et, surtout, alimente le circuit pendant les quelques millisecondes du basculement du relais.
-la quatrième alimente par son niveau « Zéro » la grille du FET MOS canal « P » 2SJ334 qui devient conducteur et alimente la radio.
Tant que la batterie principale présente une tension suffisante, la diode zéner VZ 9,1 volts est passante et alimente le premier transistor BC109. Le seuil de basculement est réglé par le petit ajustable de 5 k.Ohm et le condensateur de 4,7 µF limite la sensibilité du système ; sans lui, la moindre variation de tension engendrée par un démarrage « à donf » de la propulsion ferait basculer la sécurité !
Lorsque la tension baisse durablement, la diode zéner se bloque, et le transistor BC109 n’est plus alimenté.
Il se bloque à son tour et la résistance d’1 k.Ohm alimente l’entrée de la première Nand. Comme un et un font zéro, sa sortie bascule et verrouille le transistor BC109 par l’intermédiaire de la diode ; pas de retour en arrière possible !
Ce changement d’état de la première sortie informe, d’une part, la carte qui centralise les défauts et, d’autre part, fait basculer la sortie de la deuxième Nand, puisque un et un donnant Zéro sur la 1ère, « Zéro » et « un » sur la 2ème donne « un » sur sa sortie : le deuxième transistors BC109 est alimenté, la led rouge s’allume et le « Darlington inverseur » n’est plus alimenté, le relais « R » retombe.
C’est donc la batterie de secours qui alimente le sous-marin.
On notera que les troisième et quatrième Nands ne bougent pas car elles forment une fonction mémoire par la recopie du zéro présent en sortie de la 4ème sur une entrée de la 3ème ; ce « Zéro » force le « un » sur la porte suivante.
Cette mémoire garantie l’alimentation de la radio commande et on peut rentrer au port tranquillement au lieu de rester planté au milieu de l’étang !!! L’honneur est sauf !!!!
On remarquera sur la droite du schéma, le FET MOS canal « N » qui assure l’alimentation de la pompe de ballast dans le sens remplissage; sa présence sur cette carte est due simplement à la place disponible et aux connections électriques qu’il assure.
Lorsque je conçois un circuit imprimé, le montage étant au point et les composant définis, je réalise le dessin à l’échelle « 2 » de la plaquette imprimée vue face composants; le circuit imprimé est vu par transparence en respectant le code de couleur suivant :
Sont tracés en rouge les pistes véhiculant du « plus », en bleu celles qui véhiculent du « moins » et en vert toutes les autres.
Cette étape permet de vérifier la faisabilité, car mes circuits sont tous réalisés à la main avec le stylo adapté !
Le circuit imprimé à l’échelle 2 :
Tous les composants sont marqués; certains sont montés « debout », d’autres couchés. Le relais est un modèle capable de commuter 10 ampères, ce qui n’est pas excessif, car il ne faut pas oublier qu’il bascule sur la batterie de secours pendant une consommation de courant….
Aussi, pour des modèles plus gourmands, il ne faut pas hésiter à monter un relais capable de commuter 16 ou 20 ampères ! Attention toutefois à s’assurer que la bobine ne présente pas une résistance trop faible qui obligerait à remplacer le transistor BC148B par un modèle plus costaud…
Le connecteur représenté à gauche permet d’alimenter des auxiliaires ayant une faible consommation, les feux de position du sous-marin, dans mon cas.
Et voici les calques à l’échelle « 1 » du circuit imprimé, face circuit et face composants.
La réalisation ne présente pas de difficultés majeures et je n’ai pas établi de liste de composants, vu leur faible nombre.
Il faut juste veiller à utiliser des condensateurs avec leur tension de service adaptée, soit pour le 470 µF au moins 16 volts et 6 volts pour tous les autres.
Le circuit intégré MC14011 est monté sur support, bien que cela ne soit pas indispensable; c’est un composant robuste que je n’ai pas encore changé !
Toutes les résistances sont des ¼ de Watt à couche métallique.
Les FET MOS utilisés sont dit « à niveau logique », c'est-à-dire que leur grille est compatible avec les niveaux de tension des circuits intégrés, et il sont en boîtier TO220 isolé, ce qui évite tout risque de court circuit avec un autre composant implanté à proximité. Cependant, un modèle non isolé, moins couteux, convient parfaitement mais il devra quand même être "à niveau logique"..
Quant à la mise au point, elle est extrêmement simple et nécessite seulement une alimentation réglable et un voltmètre.
Après les vérifications d’usage (absence de courts circuits entre des pistes du CI, sens du circuit intégré…), la batterie de secours correctement chargée est branchée sur la carte. L’alimentation, réglée à 12 volts, est branchée à la place de la batterie principale.
Lors de la mise sous tension, le relais doit coller et, si on a de la chance, il le reste !
Sinon, à l’aide du voltmètre, vérifier la tension aux bornes du condensateur de 4,7 µF ; si elle est inférieure à 0,8 volt, tourner le petit ajustable de 5 K.ohm jusqu’à dépasser cette tension puis mettre hors tension la carte.
Attendre quelques secondes, nécessaires à la décharge du condensateur de RAZ, et remettre sous tension.
Le relais doit coller et le rester !
Maintenant, baisser doucement le réglage de l’alimentation jusqu’à 10 volts, tension minimum acceptable par des éléments NICD ou NIMH.
Si on a beaucoup de chance, le relais bascule dans cette zone, sinon, tourner le petit ajustable 5 K.ohm jusqu’à obtenir le basculement du relais : c’est réglé !
Vérifier le fonctionnement en réarmant plusieurs fois la carte, dans un premier temps sans bouger le réglage de l’alimentation : le relais colle et retombe aussitôt.
Puis en réglant l’alimentation à 12 volts, réarmement de la carte par mise hors puis sous tension, et baisse de la tension jusqu’à 10 volts : le relais doit basculer à tous les coups.
La carte est opérationnelle !
En cas de non fonctionnement, très improbable, il faut revérifier le circuit, le sens des composants, les soudures, les branchements et contrôler au voltmètre la présence de tension sur la carte....
Pour les cas désespérés, me contacter !!!!
Ceci clôt le premier post; le prochain, à venir bientôt, traitera de la carte qui regroupe les trois sécurités et de l’adaptation du Fail-Safe.
En attendant, voici quelques photos de l’installation sur l’U-47…
Autre vue de la carte d’alimentation; elle est implantée à l’avant droit du bâti. On remarque tout à droite, le connecteur d’antenne radio et à gauche, l’extrémité de la poche ballast, retenue par un élastique.
Vue de dessous à l’avant du bâti ; c’est chargé !
On remarque dans le bas de l’image, le second module d’auto pilotage, associé aux barres de plongée arrière.
Au premier plan, le petit connecteur jaune permet de brancher les sondes de détection d’eau.
La carte de gestion des sécurités est à peine visible entre les montants du bâti !
Les tubes IRO gris visibles à gauche contiennent les éléments de la batterie principale….
A bientôt pour la suite !
Cordialement de Jacky-Soum