Soucoupe NEMAUSA
Publié : 11 oct. 2011 23:17
Depuis pas mal d'années, l'idée de construire une soucoupe d'exploration me trottait dans la tête
grand mordu de tout ce qui porte de nom de ROV me pasionne
mais comment la construire? quelle forme? quelle taille? quelle matière? quel moyen de plonger? brèf toutes les question que doivent se poser tout les sous marinier avant de commencer un modèle.
et la recherche commence, étant plombier de métier, je feuillette pas mal de catalogues divers de pièces de plomberie en tout genre.
et voila qu'un jour je tombe sur les pièces de matériel de piscine et surtout sur les dômes de filtre a sable, la forme et la solidité (plusieurs bars de résistance en service) ont de suite attirée mon attention et BINGO!!! la soucoupe prenait forme dans mon cerveau embrumé
et BINGO!!! la soucoupe prenait forme dans mon cerveau embrumé 
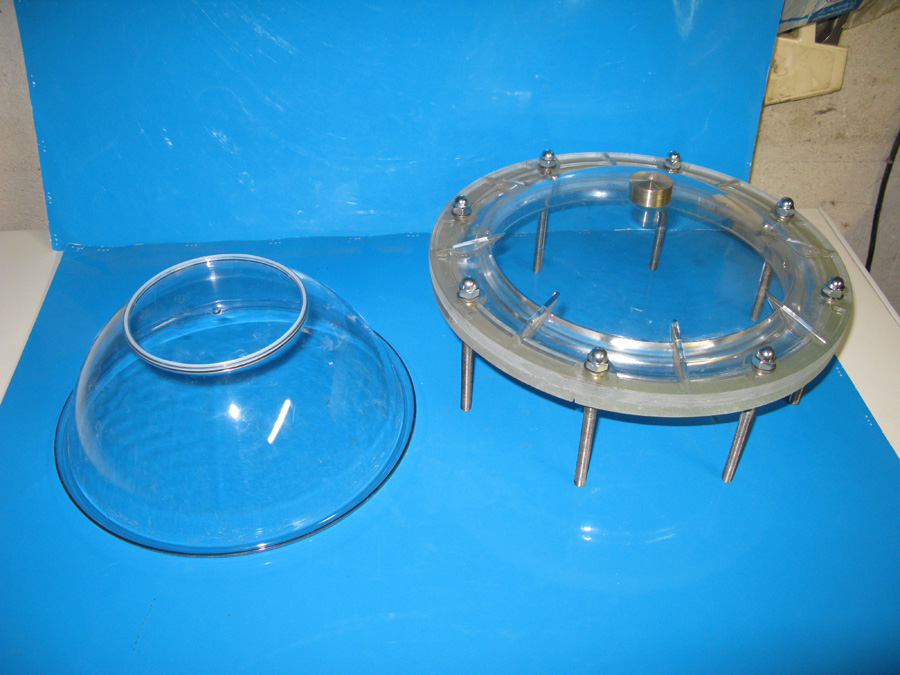
sur la photo le dôme est a droite
puis il me fallait autre chose pour constituer la coque principale car le dôme est trop plat pour renfermer tout le matos
et surtout il me fallait un diamêtre bien précis entre les trous du dôme
et c'est un en achetant a LIDL une balance de cuisine electronique (bien pratique pour peser la résine (REMORA 2000°) que la solution apparue,
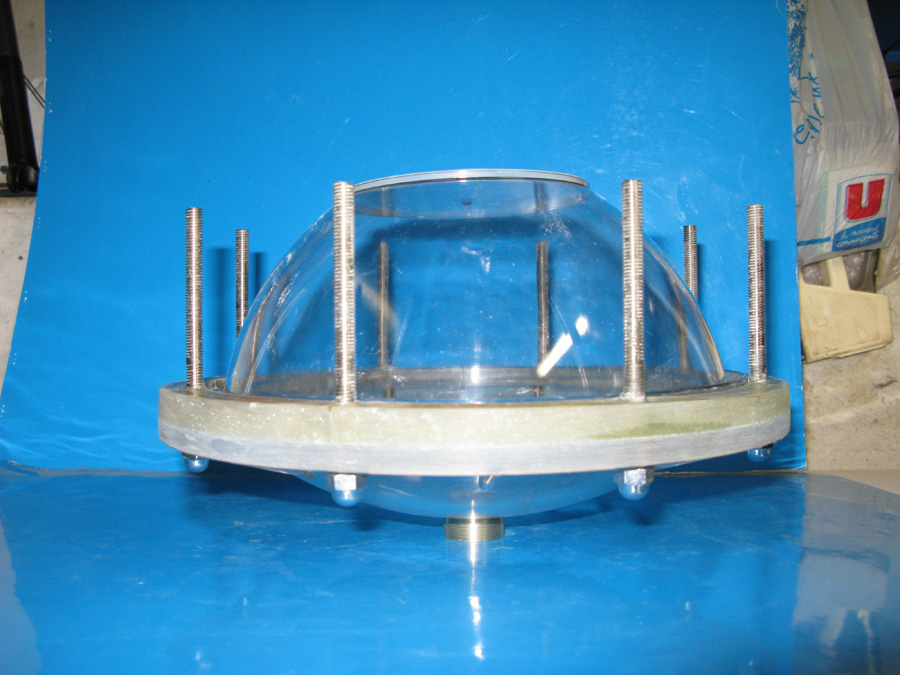
dans la boite se trouvait un saladier en plastique pour peser les aliments, quand je l'ai sorti de la boite et présenter a l'envers sur le dôme ce fut le bonheur !!!!
le dimêtre pilpoil avec les trous du dôme, la coque etaitt formée.
sur la photo du haut le saladier est a gauche
apres ce fut qu'une histoire d'imagination pour equiper et former la soucoupe
un deuxième dôme est necessaire pour faire la contre bride de serrage pour prendre en sandwich la saladier sur le joint silicone(que l'on verra plus loin)
il suffira de découper le dôme et de garder que la bride a trous qui passera par dessus le saladier.
le saladier doit avoir un rebord un peu large pour compresser le joint , le mien a la formed'une demi sphere , mais il etait creux, je l'ai donc renforcé en le remplissant d'araldite
le principal joint de la coque est coulé, la première fois ,en silicone de moulage style RTV standard, il est souple et m'a donné satisfaction pendant 1 an , puis j'ai eu des infiltrations car le rtv sous la pression de serrage des boulons, se tasse un peu et se creuse.
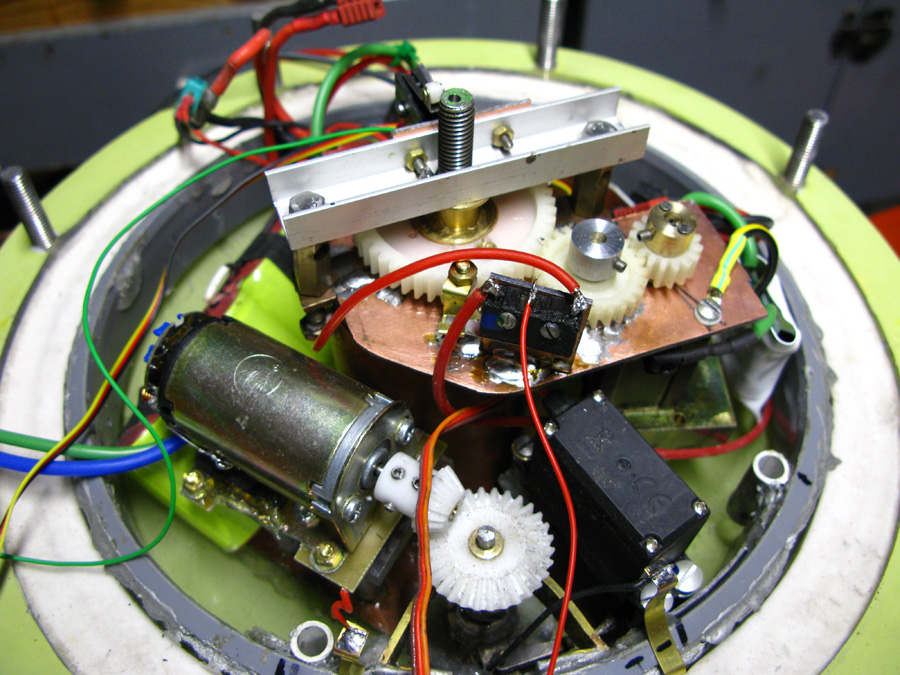
le premier moteur visible sur la photo sera remplacé par un azipod sous la coque
j'ai donc coulé un joint en RTV CHALEUR de couleur rouge, prévu pour des coulages de métal bas point de fusion, le problème c'est qu'il est plus épais, et un fois sec beaucoup trop dur pour le compresser par serrage.
a se stade un problême se posait, avec quoi faire le joint ?
c'est en parcourant le rayon de peinture et moulage d'un magasin TRUFFAUD que j'ai découvert le SILIGUM , silicone pour prise d'empreinte sous forme de pate a modeler a deux composants ,sechage environ 20mn
ca c'est le top !! !
j'ai posé un gros boudin dans la gorge du dome, j'ai de suite poser le saladier, une petite pression pour l'enfoncer et 20mn plus tard le démoulage m'a donner un supert joint a la forme de la coque

et depuis aucun soucis, il est même trop étanche, car quand je veux ouvrir NEMAUSA apres une plongée j'ai du mal tellement que ca fait ventouse
j'ai construit ensuite l'azipod, version moteur sous la coque, en remplacement du premier qui n'avait qu'un renvoi d'angle le moteur etant dans la coque.
pourquoi j'ai changé ?
bicose, les engrenages font beaucoup de bruit
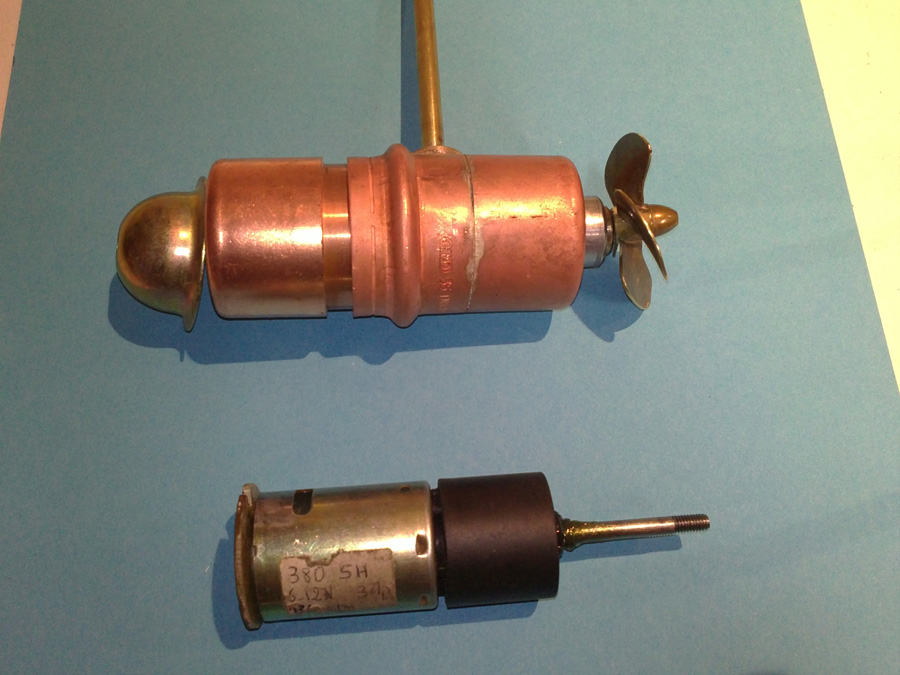
sur les deux photos suivantes on voit l'azipod et son motoreducteur ,SPEED GEAR 400 dont j'ai mdifié l'arbre de sortie, pour en mettre un plus long et pouvoir ainsi traverser je joint a lèvre pour visser l'hélice
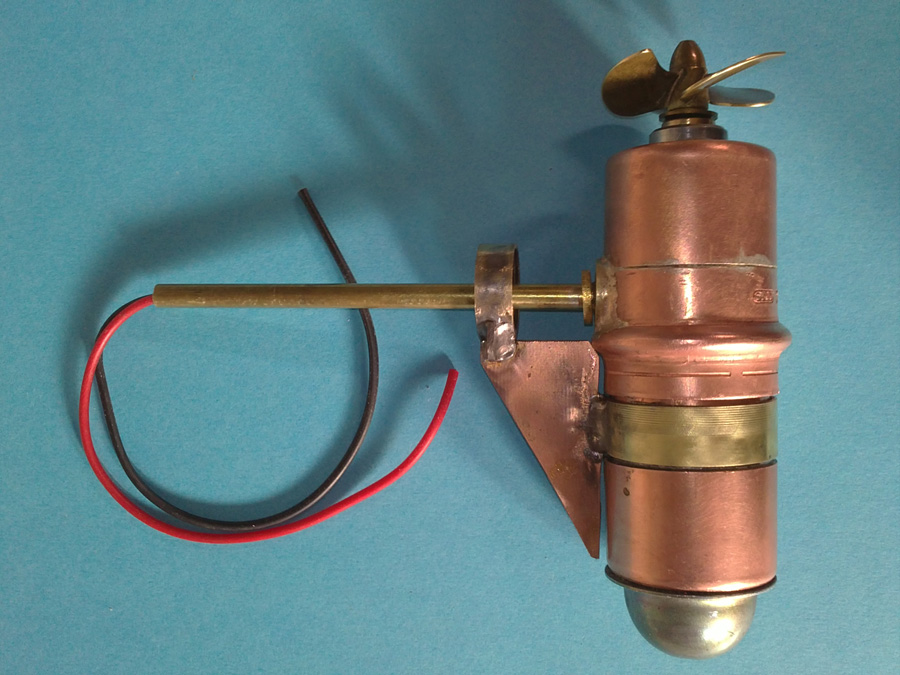


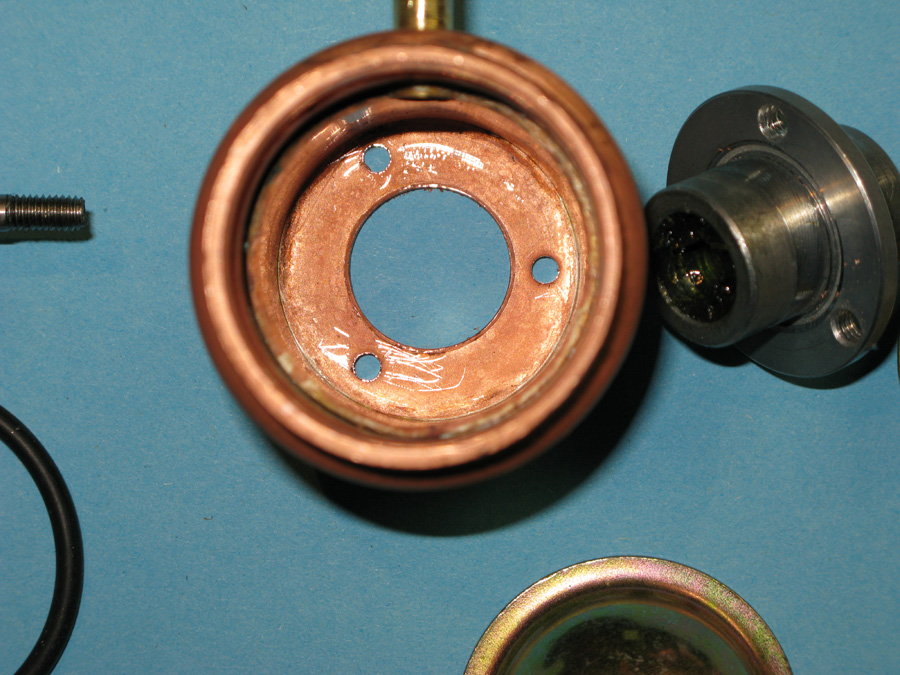
le corps est constitué de raccords de plomberie avec joint torique pour pouvoir l'ouvrir en deux a tout moment.
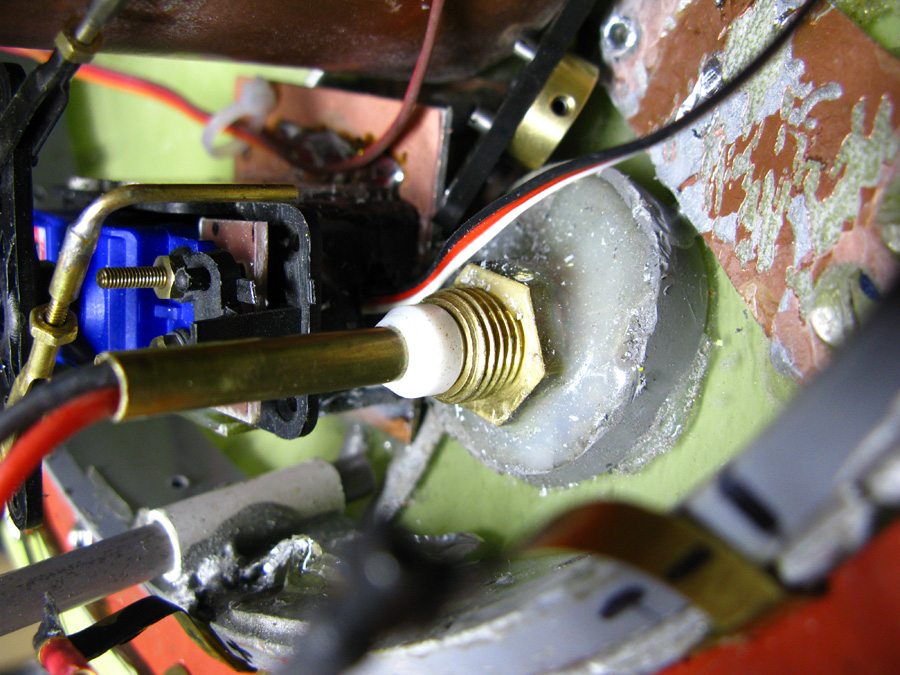
le puits de direction et terminé, sous la coque, par uun presse étoupe de robinet de chasse wc (plombier oblige) assurant ainsi l'étanchéité

et dans la coque par un raccord a bicone teflon (encore le plombier)
viens ensuite le ballast,par manque de place j'ai choisi de faire un ballast a piston vertical dans un tube cuivre de 65mm de diametre avec un piston en alu muni de deux joints toriques


sur cette photo on voie la prise d'eau sous la coque
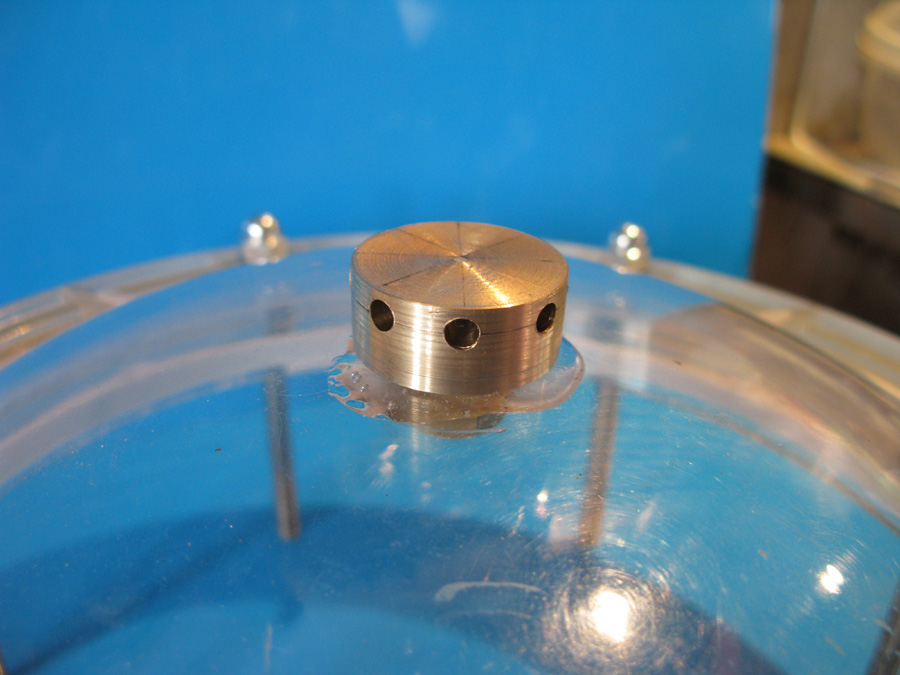
sur celle ci la fixation du ballast sur la coque
le dôme étant d'origine percé et taraudé 3/8, ce fut simple de le fixer et de faire la prise d'eau
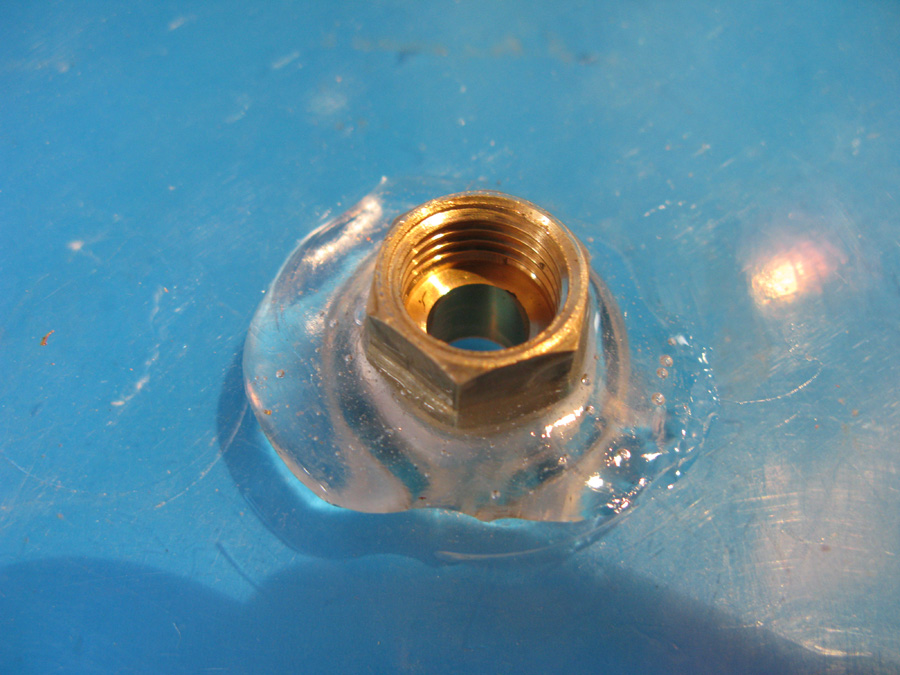
la prise d'eau vue de l'intérieur

l'entrainement se fait un jeu de pignons et une vis sans fin, du classique éprouvé
pour la finition de la coque extérieure, l'imagination fût de rigueur
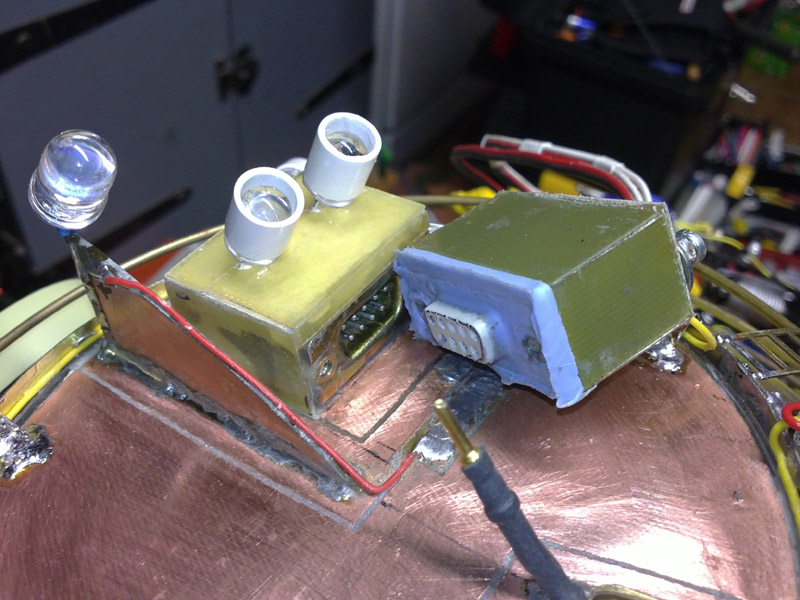
elle est composée de tube de laiton traversant des poutre découpées dans des plaques de circuit imprimé
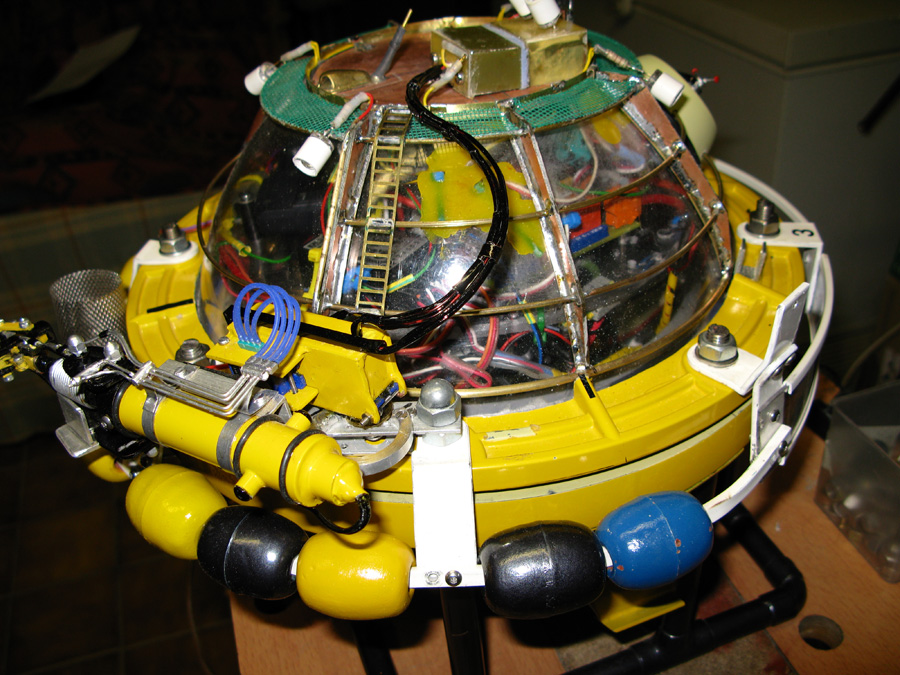

l'éclairage est constituées de led D8mm haute luminosité alimentées via les tubes laiton
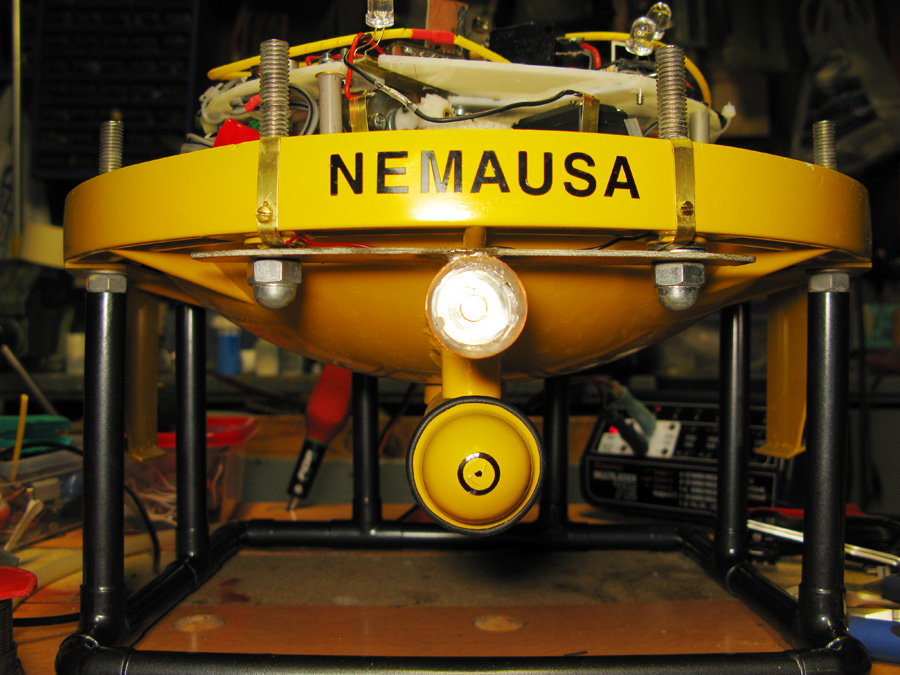
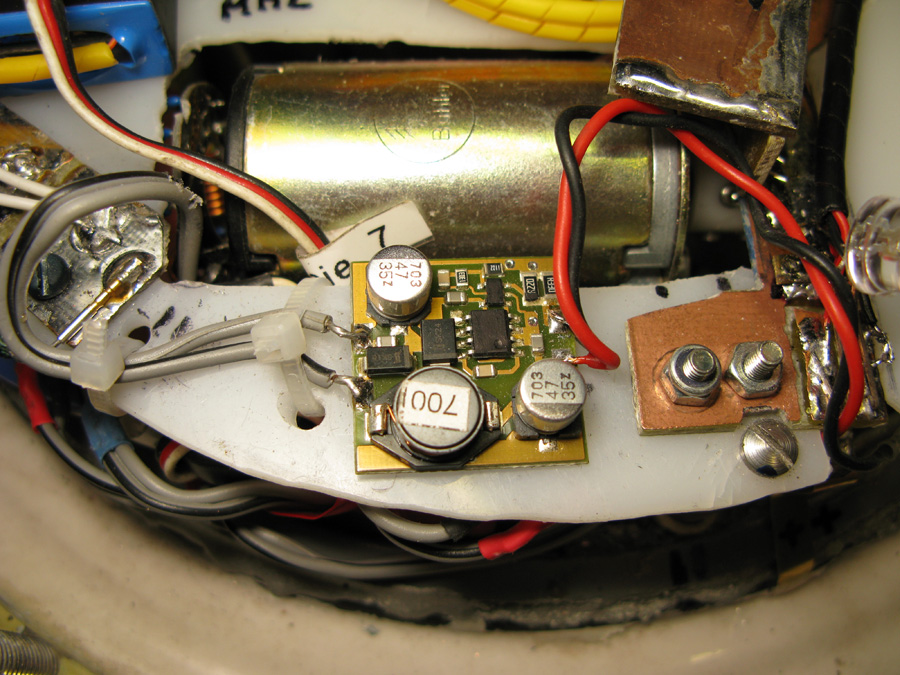
sous la coque se trouve une LED LUXEON de 3W alimentée par une alimentation régulatrice 700mA 3.6v

LUXEON DE 3W
LA PLATINE REGULATRICE
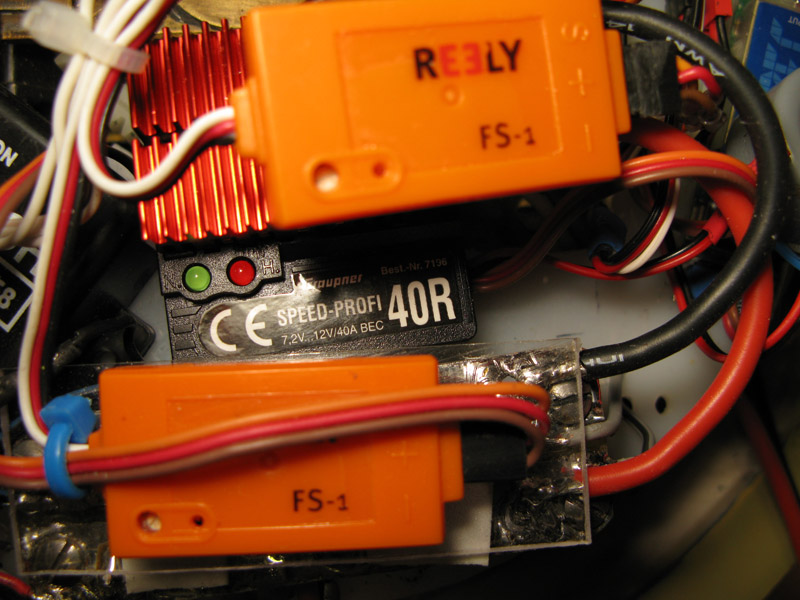
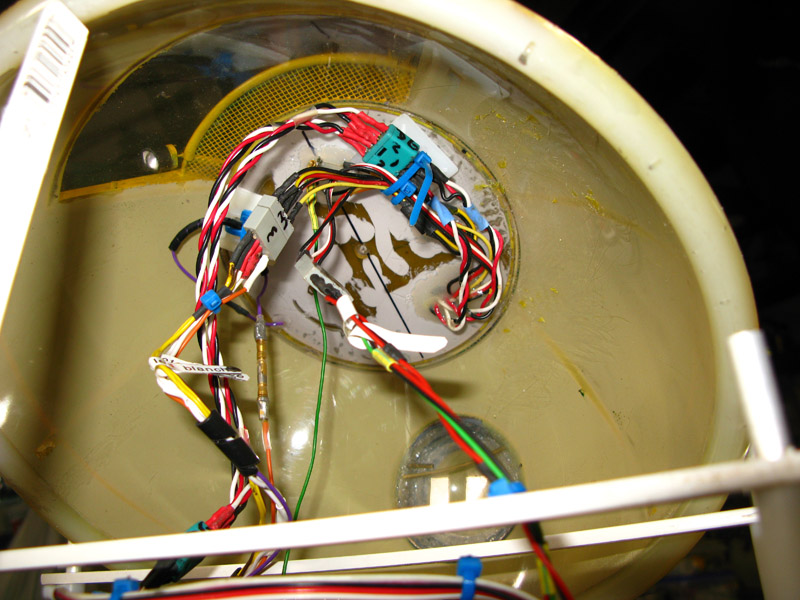
au point de vue électrique, il y a un pack NIMH 12volts 4.6Ap, un UBEC 3/5Ap pour la radio(FUTABA F14 40MHZ)
la sécurité est assuré par un fail safe en cas de perte radio qui déclenche la chasse ballast et coupure moteur
un autre fail safe branché sur un détecteur d'eau avec sonde en fond de coque qui mais lui aussi en chasse ballast des la détection d'eau
et si l'électronique générale tombe en panne et NEMAUSA coule, il me reste plus qu'a attendre environ 30mm pour voir remonter les
deux balles de ping pong reliées a 9m de drisse de pêche pour pouvoir la remonter en surface
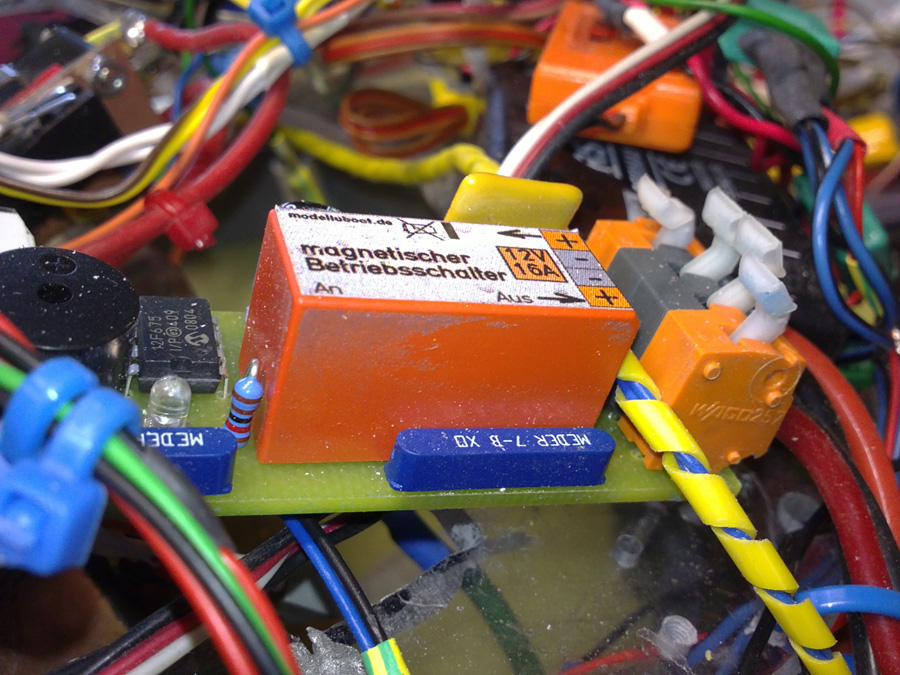
La mise en route et l'arret radio et alimentation moteurse fait par un ILS NORBERT BRUGGEN
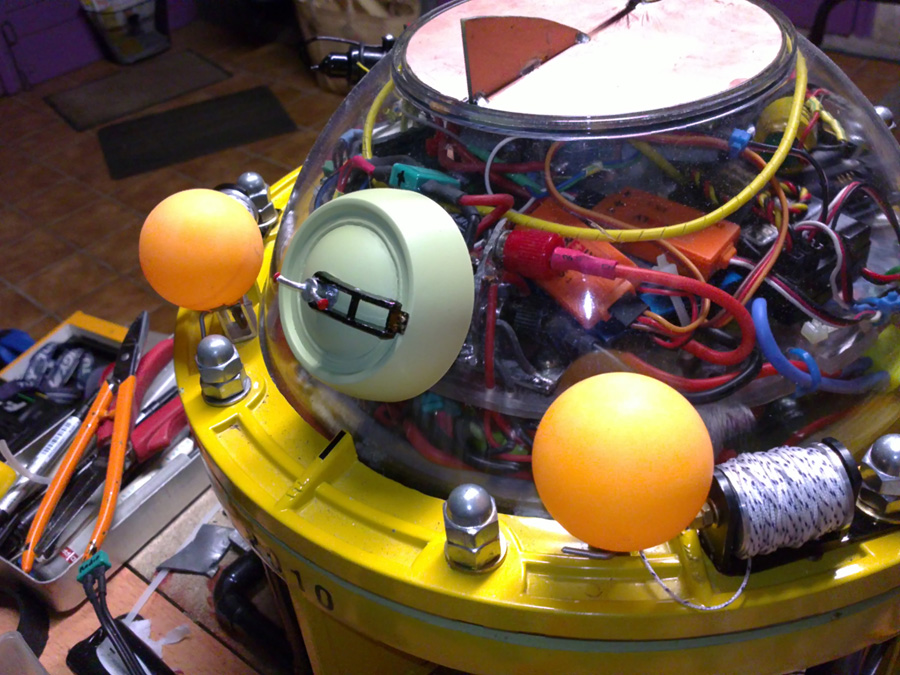
les balles sont retenues par un bout de SPAGUETTI qui se ramoli dans l'eau et casse au bout d'environ 30mm, c'est simple et efficace (truc trouvé sur ce forum, merci a l'auteur)
si avec tout ca on peut pas naviguer en toute tranquilité, ya plus qu'a rester a la maison !!
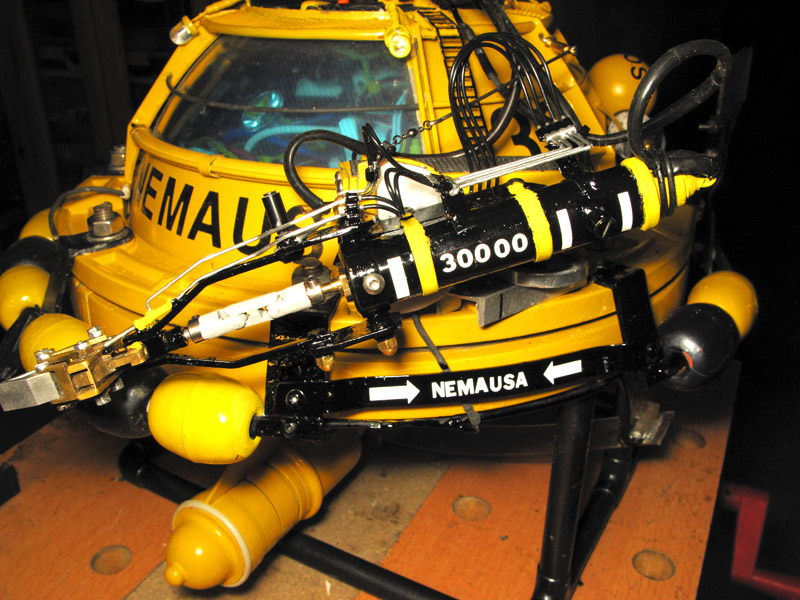
venons en au bras et a la pince


je l'ai fabriquée il y a 6 ans, après avoir récupéré sur internet un gif animé d'une pince et en partant de la je l'ai construite en ayant essuyé par mal d'échec au point de vue fonctionnement
car je n'avait aucune cotes ni vues autre que celle de profil, il m'a fallut tout imaginer, et etre patient pour en arriver a la pince finale
elle est en laiton, alu et inox pour certaine vis
l'entrainement se fait par vis sans fin, avec un motoreducteur dans un tube cuivre de 16mm intérieur,
vue éclatée
vue mmonté

sortie arbre par joint a lèvre
accouplement moteur/pince

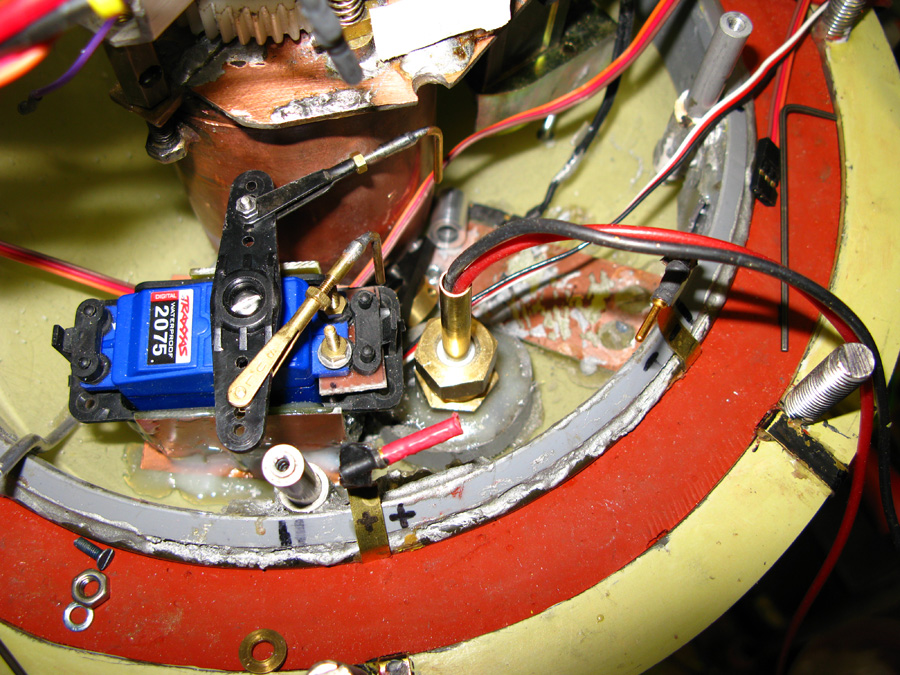
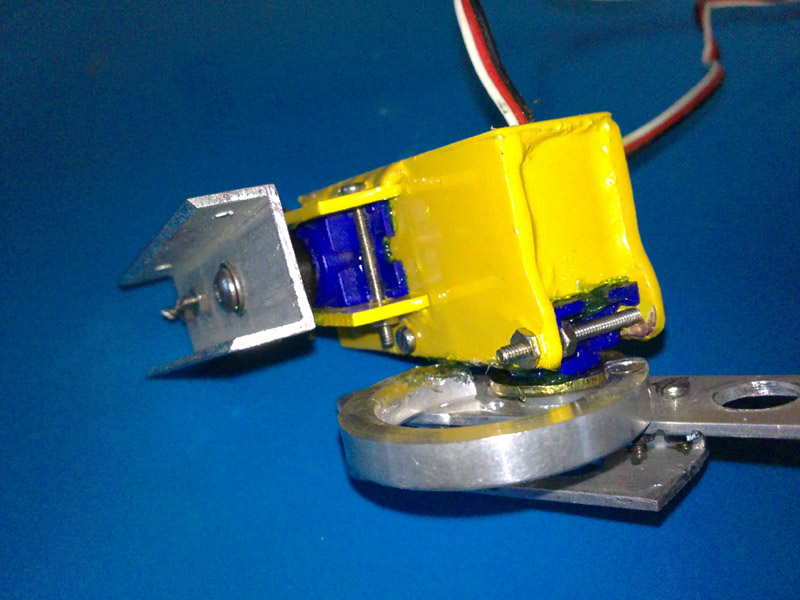
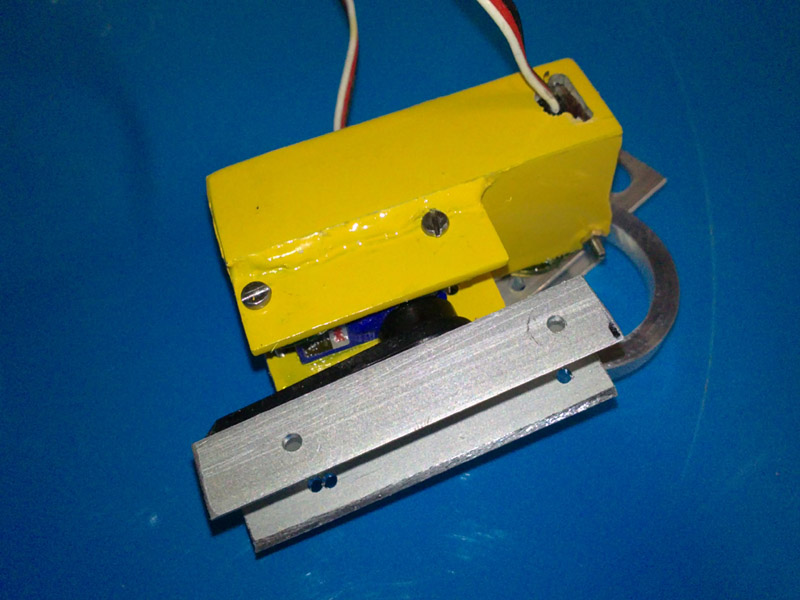
la rotation se fait par deux servo étanches, un a l'envers pour la rotation, l'autre horizontal pour monter ou descendre le bras, tout les deux dans une sorte de caisson en plaque de circuit imprimé,
et fixé a la coque par la tête du servo
concernant les servos je les ai étanchés moi mêmes par de la graisse dans les pignons et du silicone pour noyer la partie electronique
a se jour le servo de rotation ne m'a donné au soucis, le fait d'avoir la tete a l'envers, cela empêche la graisse de couler sur le potentiomêtre du neutre, et l'eau de rentrer puisque il fait office de cloche
par contre le servo hrizontal ,lui m'a donné du fil a retordre, pas de problême causé par l'eau, mais des pignons plastique cassés causé par des débattements brusque répétitifs provoqués par la graisse sur le potard
j'ai essayée toute sorte de graisse,marine,silicone,teflon,belleville,spécial roulement et j'en passe, le problême reste le meme.
j'attend les nouveaux servos étanches de chez graupner référence DES pour les monter et voir le résultat
la connection électrique et radio des servos, se fait par une prise 9 contacts d'ordinateur, coulée dans la résine avec un joint au siligum entre les deux parties
apres le reste n'est q'une question de peinture et autocolant
et tous ca pour en arriver là

voila c'est mon premier tuto j'espère qu'il vous plaira, je m'attend a pas mal de questions
petit relooking au niveau du bras et de la pince, le tout en photos

a plus
dominique
grand mordu de tout ce qui porte de nom de ROV me pasionne
mais comment la construire? quelle forme? quelle taille? quelle matière? quel moyen de plonger? brèf toutes les question que doivent se poser tout les sous marinier avant de commencer un modèle.
et la recherche commence, étant plombier de métier, je feuillette pas mal de catalogues divers de pièces de plomberie en tout genre.
et voila qu'un jour je tombe sur les pièces de matériel de piscine et surtout sur les dômes de filtre a sable, la forme et la solidité (plusieurs bars de résistance en service) ont de suite attirée mon attention
sur la photo le dôme est a droite
puis il me fallait autre chose pour constituer la coque principale car le dôme est trop plat pour renfermer tout le matos
et surtout il me fallait un diamêtre bien précis entre les trous du dôme
et c'est un en achetant a LIDL une balance de cuisine electronique (bien pratique pour peser la résine (REMORA 2000°) que la solution apparue,
dans la boite se trouvait un saladier en plastique pour peser les aliments, quand je l'ai sorti de la boite et présenter a l'envers sur le dôme ce fut le bonheur !!!!
le dimêtre pilpoil avec les trous du dôme, la coque etaitt formée.
sur la photo du haut le saladier est a gauche
apres ce fut qu'une histoire d'imagination pour equiper et former la soucoupe
un deuxième dôme est necessaire pour faire la contre bride de serrage pour prendre en sandwich la saladier sur le joint silicone(que l'on verra plus loin)
il suffira de découper le dôme et de garder que la bride a trous qui passera par dessus le saladier.
le saladier doit avoir un rebord un peu large pour compresser le joint , le mien a la formed'une demi sphere , mais il etait creux, je l'ai donc renforcé en le remplissant d'araldite
le principal joint de la coque est coulé, la première fois ,en silicone de moulage style RTV standard, il est souple et m'a donné satisfaction pendant 1 an , puis j'ai eu des infiltrations car le rtv sous la pression de serrage des boulons, se tasse un peu et se creuse.
le premier moteur visible sur la photo sera remplacé par un azipod sous la coque
j'ai donc coulé un joint en RTV CHALEUR de couleur rouge, prévu pour des coulages de métal bas point de fusion, le problème c'est qu'il est plus épais, et un fois sec beaucoup trop dur pour le compresser par serrage.
a se stade un problême se posait, avec quoi faire le joint ?
c'est en parcourant le rayon de peinture et moulage d'un magasin TRUFFAUD que j'ai découvert le SILIGUM , silicone pour prise d'empreinte sous forme de pate a modeler a deux composants ,sechage environ 20mn
ca c'est le top !!
j'ai posé un gros boudin dans la gorge du dome, j'ai de suite poser le saladier, une petite pression pour l'enfoncer et 20mn plus tard le démoulage m'a donner un supert joint a la forme de la coque
et depuis aucun soucis, il est même trop étanche, car quand je veux ouvrir NEMAUSA apres une plongée j'ai du mal tellement que ca fait ventouse
j'ai construit ensuite l'azipod, version moteur sous la coque, en remplacement du premier qui n'avait qu'un renvoi d'angle le moteur etant dans la coque.
pourquoi j'ai changé ?
bicose, les engrenages font beaucoup de bruit
sur les deux photos suivantes on voit l'azipod et son motoreducteur ,SPEED GEAR 400 dont j'ai mdifié l'arbre de sortie, pour en mettre un plus long et pouvoir ainsi traverser je joint a lèvre pour visser l'hélice
le corps est constitué de raccords de plomberie avec joint torique pour pouvoir l'ouvrir en deux a tout moment.
le puits de direction et terminé, sous la coque, par uun presse étoupe de robinet de chasse wc (plombier oblige) assurant ainsi l'étanchéité
et dans la coque par un raccord a bicone teflon (encore le plombier)
viens ensuite le ballast,par manque de place j'ai choisi de faire un ballast a piston vertical dans un tube cuivre de 65mm de diametre avec un piston en alu muni de deux joints toriques
sur cette photo on voie la prise d'eau sous la coque
sur celle ci la fixation du ballast sur la coque
le dôme étant d'origine percé et taraudé 3/8, ce fut simple de le fixer et de faire la prise d'eau
la prise d'eau vue de l'intérieur
l'entrainement se fait un jeu de pignons et une vis sans fin, du classique éprouvé
pour la finition de la coque extérieure, l'imagination fût de rigueur
elle est composée de tube de laiton traversant des poutre découpées dans des plaques de circuit imprimé
l'éclairage est constituées de led D8mm haute luminosité alimentées via les tubes laiton
sous la coque se trouve une LED LUXEON de 3W alimentée par une alimentation régulatrice 700mA 3.6v
LUXEON DE 3W
LA PLATINE REGULATRICE
au point de vue électrique, il y a un pack NIMH 12volts 4.6Ap, un UBEC 3/5Ap pour la radio(FUTABA F14 40MHZ)
la sécurité est assuré par un fail safe en cas de perte radio qui déclenche la chasse ballast et coupure moteur
un autre fail safe branché sur un détecteur d'eau avec sonde en fond de coque qui mais lui aussi en chasse ballast des la détection d'eau
et si l'électronique générale tombe en panne et NEMAUSA coule, il me reste plus qu'a attendre environ 30mm pour voir remonter les
deux balles de ping pong reliées a 9m de drisse de pêche pour pouvoir la remonter en surface
La mise en route et l'arret radio et alimentation moteurse fait par un ILS NORBERT BRUGGEN
les balles sont retenues par un bout de SPAGUETTI qui se ramoli dans l'eau et casse au bout d'environ 30mm, c'est simple et efficace (truc trouvé sur ce forum, merci a l'auteur)
si avec tout ca on peut pas naviguer en toute tranquilité, ya plus qu'a rester a la maison !!
venons en au bras et a la pince
je l'ai fabriquée il y a 6 ans, après avoir récupéré sur internet un gif animé d'une pince et en partant de la je l'ai construite en ayant essuyé par mal d'échec au point de vue fonctionnement
car je n'avait aucune cotes ni vues autre que celle de profil, il m'a fallut tout imaginer, et etre patient pour en arriver a la pince finale
elle est en laiton, alu et inox pour certaine vis
l'entrainement se fait par vis sans fin, avec un motoreducteur dans un tube cuivre de 16mm intérieur,
vue éclatée
vue mmonté
sortie arbre par joint a lèvre
accouplement moteur/pince
la rotation se fait par deux servo étanches, un a l'envers pour la rotation, l'autre horizontal pour monter ou descendre le bras, tout les deux dans une sorte de caisson en plaque de circuit imprimé,
et fixé a la coque par la tête du servo
concernant les servos je les ai étanchés moi mêmes par de la graisse dans les pignons et du silicone pour noyer la partie electronique
a se jour le servo de rotation ne m'a donné au soucis, le fait d'avoir la tete a l'envers, cela empêche la graisse de couler sur le potentiomêtre du neutre, et l'eau de rentrer puisque il fait office de cloche
par contre le servo hrizontal ,lui m'a donné du fil a retordre, pas de problême causé par l'eau, mais des pignons plastique cassés causé par des débattements brusque répétitifs provoqués par la graisse sur le potard
j'ai essayée toute sorte de graisse,marine,silicone,teflon,belleville,spécial roulement et j'en passe, le problême reste le meme.
j'attend les nouveaux servos étanches de chez graupner référence DES pour les monter et voir le résultat
la connection électrique et radio des servos, se fait par une prise 9 contacts d'ordinateur, coulée dans la résine avec un joint au siligum entre les deux parties
apres le reste n'est q'une question de peinture et autocolant
et tous ca pour en arriver là
voila c'est mon premier tuto j'espère qu'il vous plaira, je m'attend a pas mal de questions
petit relooking au niveau du bras et de la pince, le tout en photos
a plus
dominique