
Je vais parler ici donc, d'essais de code, de programmation, d'échec, de mixage de voies... Bref, ce qui fait la joie ou pas de notre discipline en eau, dans les airs ou bien sur terre.
Je ne pense pas faire un cours complet sur la programmation, d'abord, c'est impossible tellement il y a de possibilités et ensuite par ce qu'il faudrait que je vous en explique chaque registre. Je vais me contenter, comme on le fait pour un modèle de vous montrer l'évolution, la conception et les idées jetées sur le papier qui sont à expérimenter. Certaines des options déjà écrites seront abandonnées faute de réel intérêt.
La première étape, avant de se lancer dans quoi que ce soit est de faire un bref cahier des charges. Comme je veux rendre les choses expérimentales, je vais essayer de découper tout ce petit monde en deux grosses familles. L'émetteur et le récepteur.
L'émetteur :
Il est constitué d'une boite imprimée. Il sera pourvu d'une carte électronique complète (STM32F4 à base de Cortex M4 de chez ARM). Certains me diront que c'est barbare et je vais faire une petite brève pour m'en expliquer. STM 32, c'est le nom de la carte hôte. Elle dispose de 100 pins d'entrées / sorties, d'un accéléromètre et de quelques subtilités tel que l'audio, les divers bus USART, UART, I²C... Cortex M4, c'est le nom de la puce, ou principalement du microcontrôleur 32 bits. Et oui, on est loin des PIC sous 8 bits... C'est un gros plus mais pas seulement. Enfin, ARM est le concepteur de la puce Cortex M4.
A partir de là, il faut parlé écran. Rien ne sert de mettre une formule 1 dans une radio-commande si on a pas de quoi afficher la moindre information. Je me contente d'un modeste écran plat (c'est pour faire genre) avec une dalle tactile tel qu'on en as sur un PDA (Organiseur d'avant les smartphones). Il faudra faire suivre le stylet ! Il aura pour but de permettre de faire des réglages dans les trims extrêmes ainsi que de gérer les mixages de voie, le retour vidéo (cas d'un robot d'exploration)...
J'ai pour habitude de dire que « qui peut le plus, peut le moins ». C'est le cas avec ces modes complexes. Vouloir gérer les maximas de la course des servos ne sera pas simple. Et c'est pourquoi, par curiosité et par envie d'apprendre à programmer ces petites fonctions, je vais essayer.
Enfin, par ce que je conçois qu'il peut être intéressant de sauvegarder les données de la radio, ainsi que des mixages, je vais ajouter une carte SD voir SDHC (c'est encore un truc pas simple mais le but est toujours d'expérimenter).
Il manque encore la RF (Radio Fréquence). J'ai parlé de 433Mhz, oui, c'est vrai à 41 Mhz ça passe déjà mal dans l'eau. Le but sera d'abord de créer des antennes ayant un grand gain. Plus le gain est grand, plus le récepteur est capable de recevoir ces ordres. Là, je compte pas seulement transmettre des données, mais aussi en recevoir... Il faudra donc gérer le protocole de transmission, ainsi que la rapidité d'exécution de tout ça.
Dernier point important. J'espère avoir la possibilité de mettre une prise écolage compatible avec le standard des radios du commerce. Le but serait, par exemple d'aider ceux qui veulent s'essayer au pilotage tout en ayant la main sur ce qui se passe.
Le récepteur :
Il convient de faire l'état des lieux. On a besoin de recevoir des données, de commander des variateurs, de piloter des servomoteurs, un ballast, des lampes... Que sais-je.
Je vais, dans la mesure du possible rester proche des standards du commerce. Une trame toutes les 20ms comprise entre 1 et 2ms avec un neutre à 1,5ms.
Un variateur interne sera prévu afin de pouvoir éventuellement en faire en fonction de divers moteurs. J'espère aller jusqu'au Brushless...
Enfin, puisque on parle de sous-marin... J'aimerais tester la température des organes dans le sous-marin, savoir si il y a une voie d'eau. Et pourquoi pas savoir l'état de la batterie en plongée. Tout cela sera donc expérimenté quand j'aurais fini la radio et que j'en serais au récepteur.
Dernière étape avant de changer de sujet. La miniaturisation. La radiocommande ne sera pas réduite après. Elle restera pour son usage (conviviale). En revanche, pour le récepteur, je vais devoir lui faire subir une cure d'amaigrissement afin de pouvoir l'intégrer dans le plus petit de mes futurs projets de sous-marin.
La modélisation :
Ayant ce cahier des charges en tête, une carte STM32F4 en main avec son contrôleur, j'ai attaqué la modélisation de la radio. Quelques étapes de la conception avec :
J'ai pris Catia, je me suis un peu amusé avec. J'ai fais en sorte que mes pièces soit réalisables en impression 3D. C'est aussi pour ça que je commence par là. Il m'a fallu reporter tout les organes connus de la radio standard et y ajouter les composants tels que l'écran tactile et la STM32F4. Pour l'heure, les panneaux inférieurs sont lisses à l'intérieur mais j'ajouterais les bosselages nécessaires pour ajouter les cartes et composants qui en auront besoin.
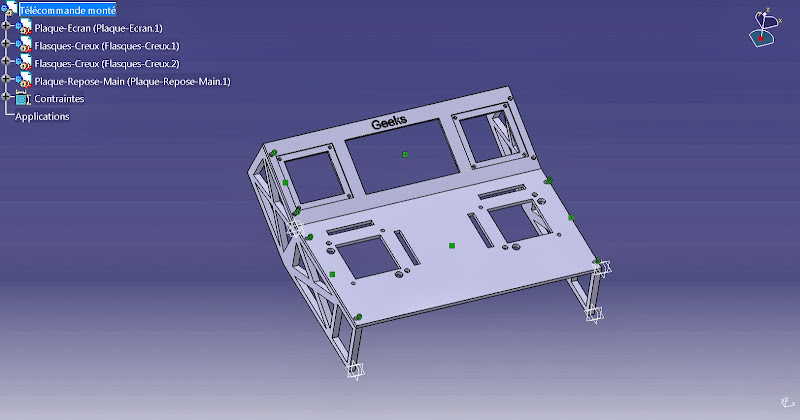
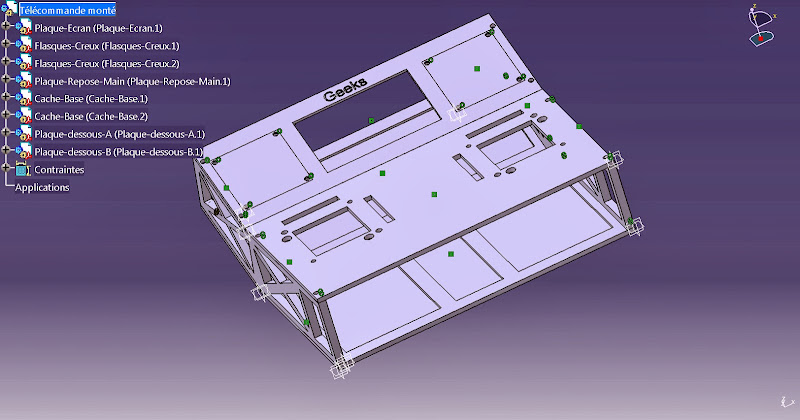
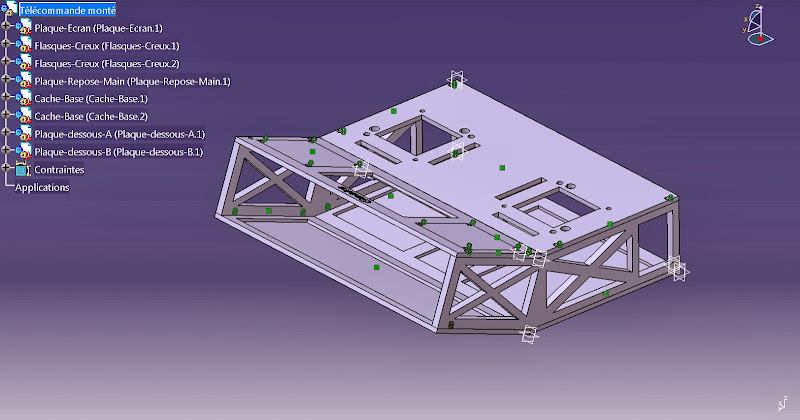
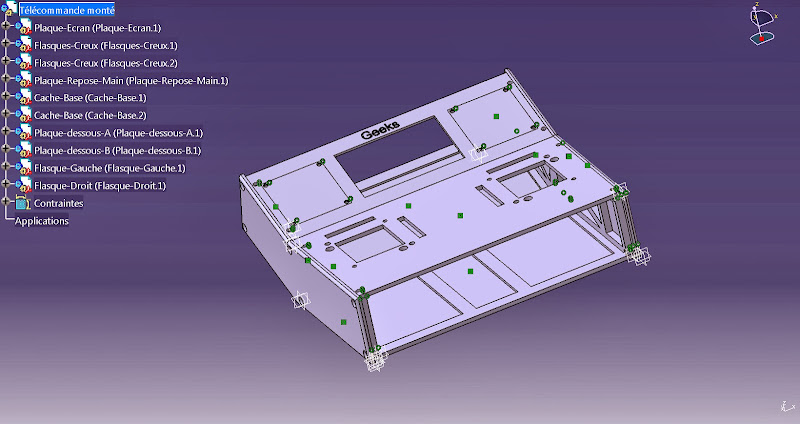
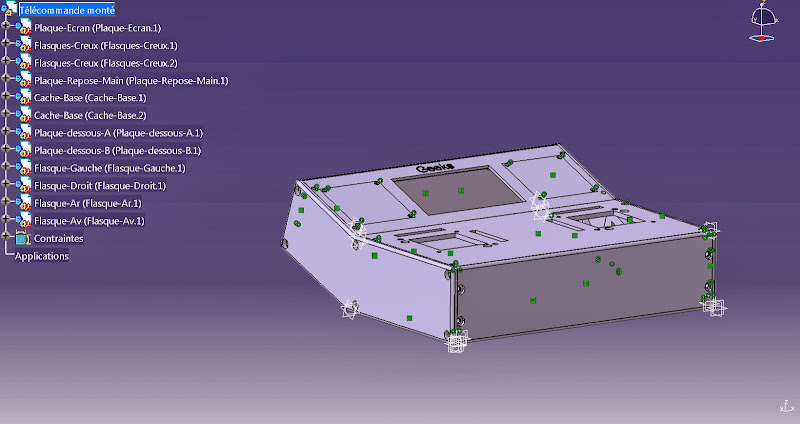
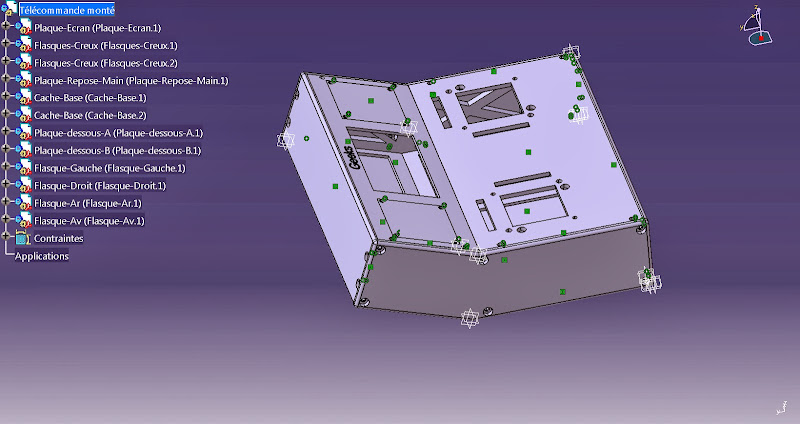
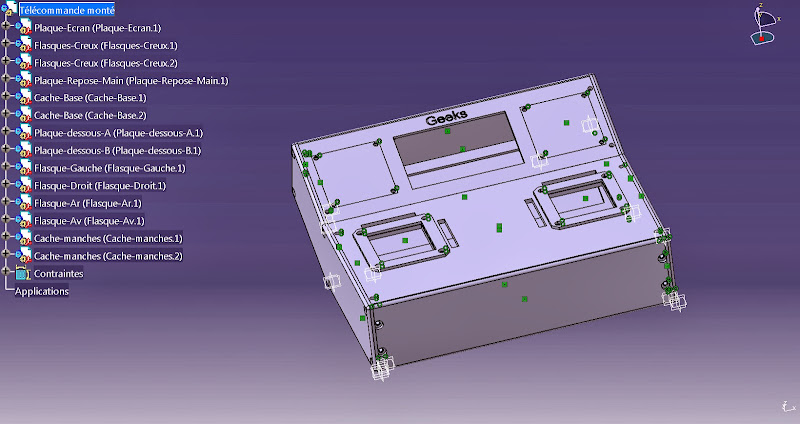
On voit bien les différentes pièces qui sont venues s'ajouter au fur et à mesure de la modélisation. En théorie, ça devrait passer sans mal dans mon imprimante. On est quand même dans des plaques de 20cm
Bon, sur ce, malgré un week-end de modélisation, demain, il faut se lever tôt. Donc, je vous laisse le sujet, il se complémentera ensuite avec des schémas, des idées, des avancées et des ratés
Geeks.


